Pick-and-place process sequencing for transformation of rasterized 3D structures
Pick-and-place process sequencing for transformation of rasterized 3D structures
Abstract
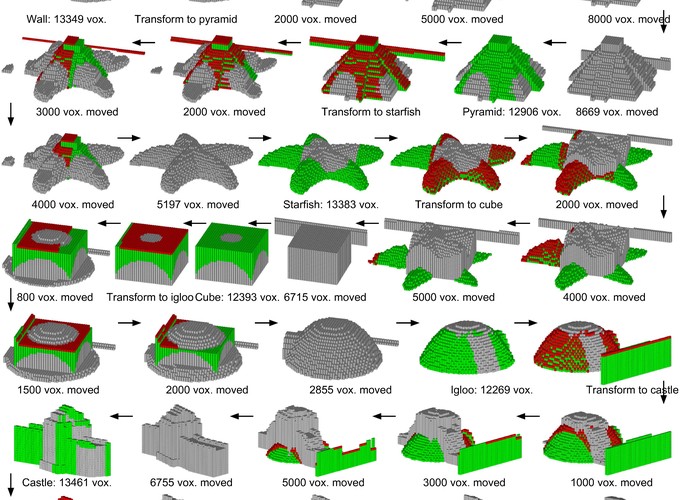
We present an optimization method for process sequencing in automated assembly of three-dimensional physical structures comprised of uniform elements using robotic equipment. This is part of a process of large-scale construction based on a pick-and-place (PnP) assembly approach. We show that PnP process sequencing is a kind of assignment problem that can be solved by the Hungarian method. The approach adopted in the strategy may be generalized in different application-dependent scenarios, such as from crane operations to large scale 3D printing.
Type
Publication
Automation in Construction