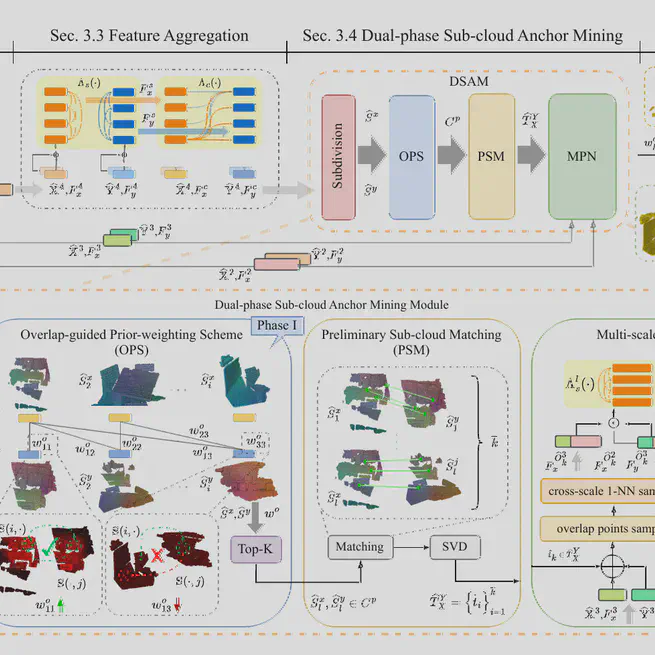
SuP: Sub-cloud Driven Point Cloud Registration
SuP turns low-overlap point cloud registration into high-overlap sub-cloud anchor mining, using DSAM, OPS, MPN, and merge-to-match to recover reliable correspondences from ambiguous partial scans.
Jan 1, 2026
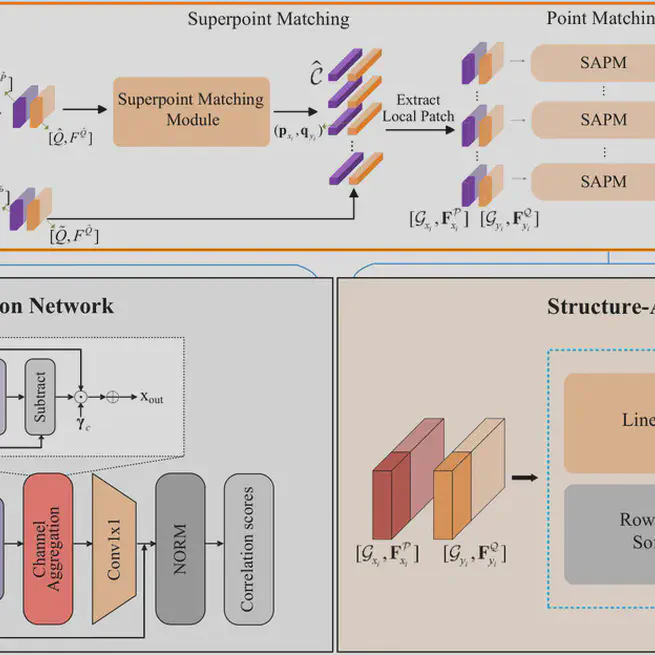
Dynamic correlation network and structure-aware matching for robust point cloud registration
Relative rotations between point clouds pose significant challenges for reliable correspondence estimation.
Jan 1, 2026
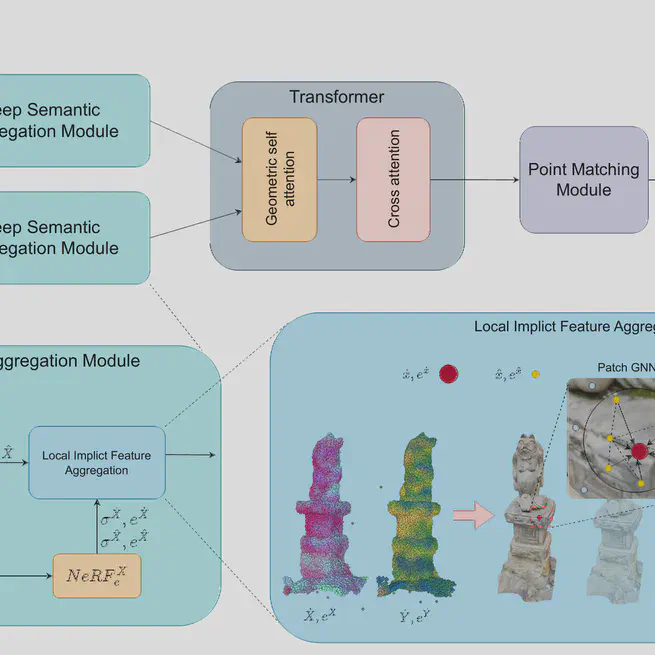
DeSC: Learning Deep Semantic Descriptor for NeRF Registration
DeSC learns deep semantic descriptors from NeRF's view-independent embedding space, combining local implicit photometric cues, graph aggregation, Transformer context, and density-aware photometric consistency for robust NeRF-to-NeRF registration.
Jan 1, 2025
SemReg: Semantics-Constrained Point Cloud Registration
SemReg incorporates semantic labels as geometric registration constraints, enabling robust point cloud alignment even in textureless or symmetry-ambiguous regions where purely geometric methods fail, with state-of-the-art results on indoor and outdoor benchmarks.
Sep 1, 2024
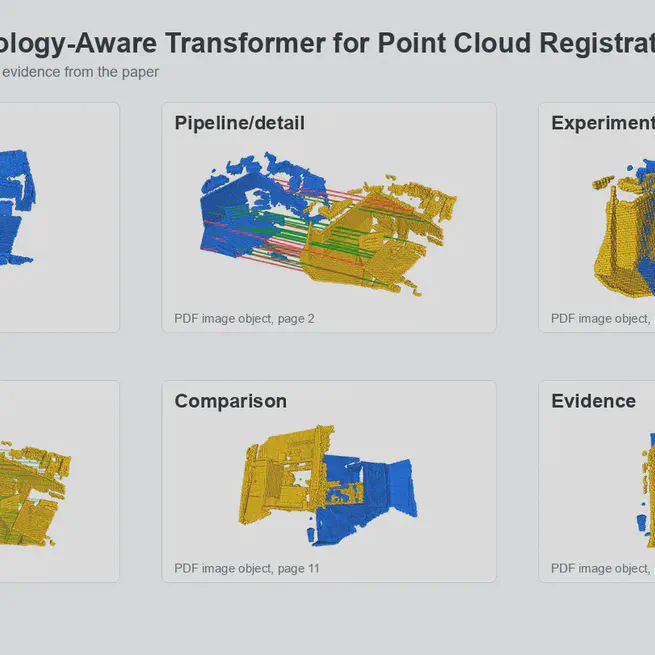
TopFormer: Topology-Aware Transformer for Point Cloud Registration
TopFormer augments transformer-based point cloud registration with topological structure descriptors, improving correspondence quality in geometrically repetitive and low-texture regions by encoding how local surface neighbourhoods connect globally.
Apr 1, 2024
3D Autoscan System
A scanner + rotary platform pipeline that captures arbitrary objects to ~0.1 mm in under 5 minutes—built to seed a 3D shape database without per-object parameter tuning.
Jan 15, 2019