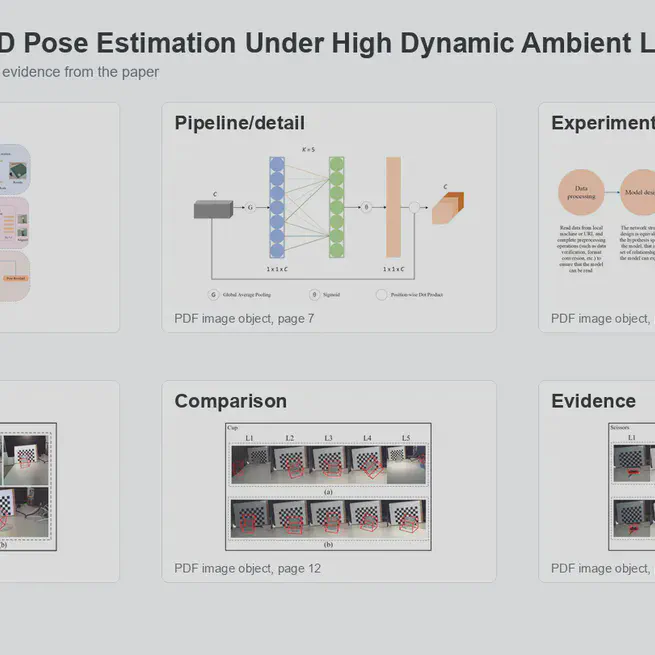
Robust Object 6D Pose Estimation Under High Dynamic Ambient Light
This paper addresses the challenges in object 6D pose estimation caused by illumination changes, proposing an improved Gen6D method for robust operation under high dynamic ambient light conditions.
Jan 1, 2026
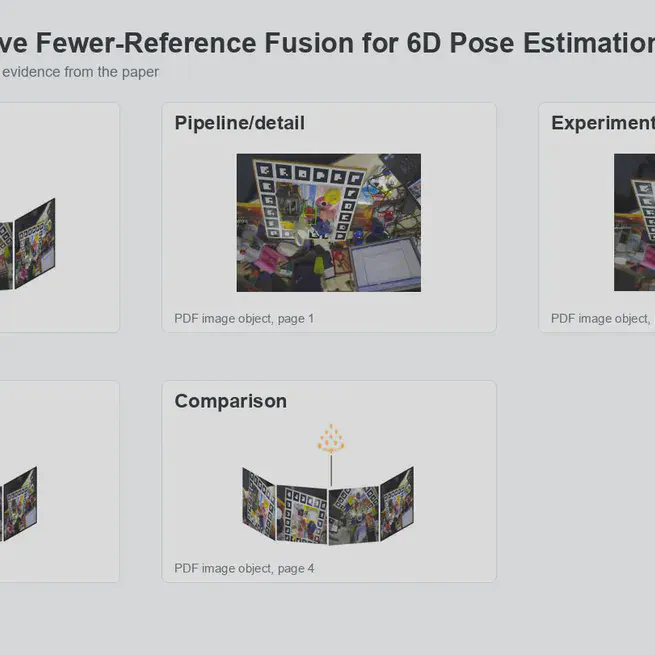
SFRF6D: Selective Fewer-Reference Fusion for 6D Pose Estimation
SFRF6D is a model-free 6D pose estimation framework that uses only a few RGB-D reference images, combining reference-view rendering, geometry-guided sparse attention, and coarse-to-fine pose selection for robust estimation under occlusion.
Jan 1, 2025
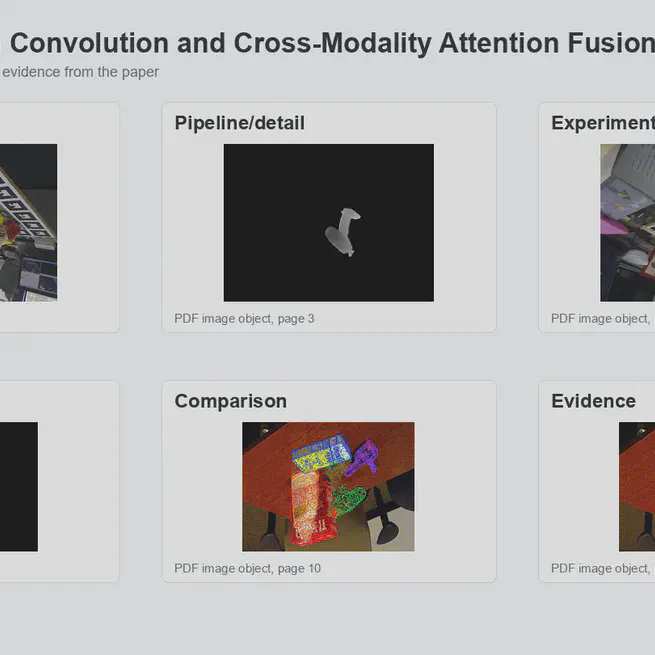
GCMA6D: Graph Convolution and Cross-Modality Attention Fusion for 6D Pose Estimation
GCMA6D is an RGB-D 6D pose estimation network that combines 3D graph convolution, Large Kernel Attention, and cross-modality attention fusion to improve robustness for occluded and low-texture objects.
Jan 1, 2025