SFRF6D: Selective Fewer-Reference Fusion for 6D Pose Estimation
SFRF6D is a model-free 6D pose estimation framework for settings where CAD models are unavailable and only a few RGB-D reference images can be collected. It is designed for large viewpoint changes, occlusion, and sparse reference coverage.
This work appears in Proceedings of the Australasian Conference on Robotics and Automation (ACRA 2025).
Problem setting
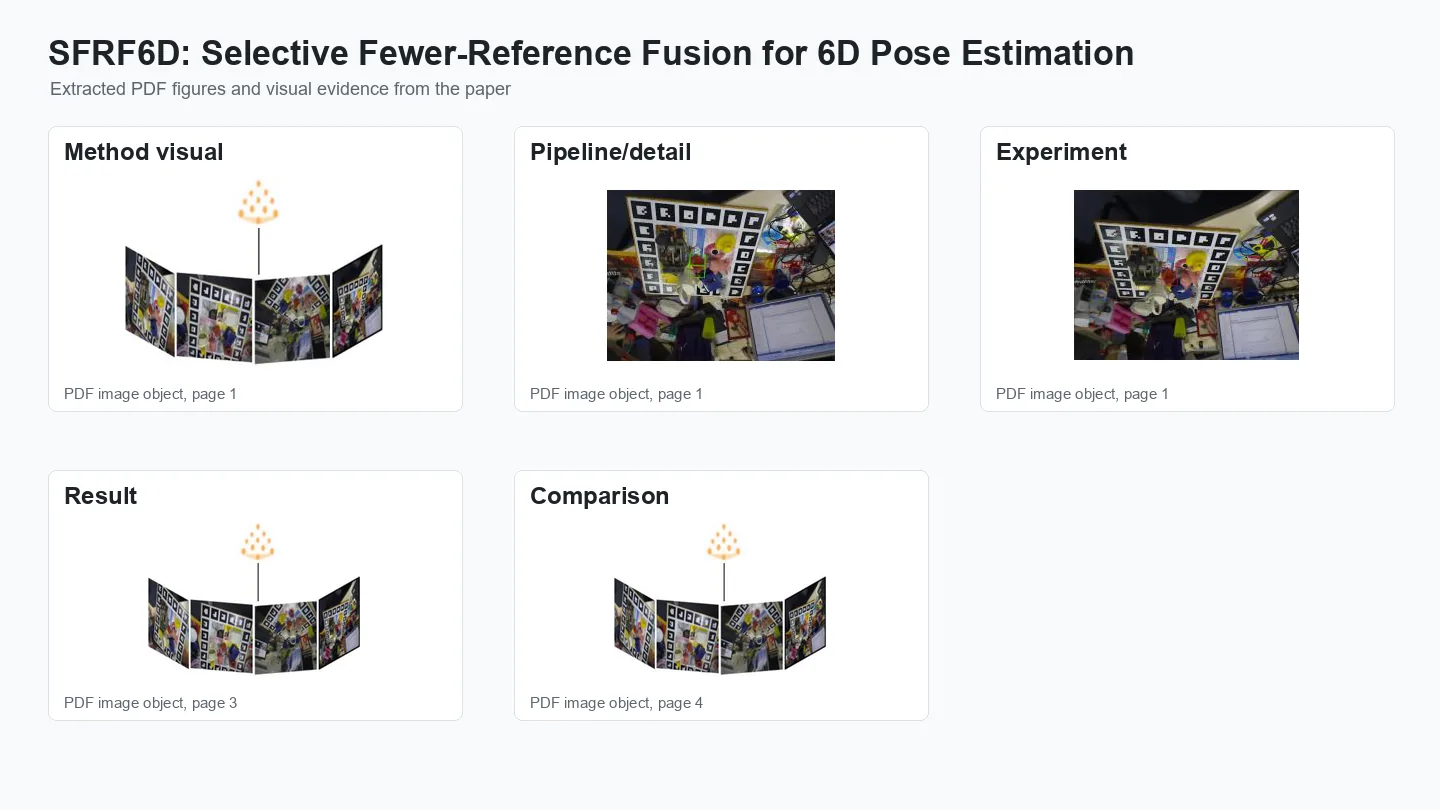
Most 6D pose estimation methods rely on object CAD models or dense reference views. SFRF6D reduces this dependency by using a small set of RGB-D reference images with known poses. It reconstructs a lightweight object representation, renders reference views, and uses geometry-guided sparse cross-view attention to select reliable visible correspondences.
The figures below collect representative visual evidence from Proceedings of the Australasian Conference on Robotics and Automation (ACRA 2025).
Method and visual evidence
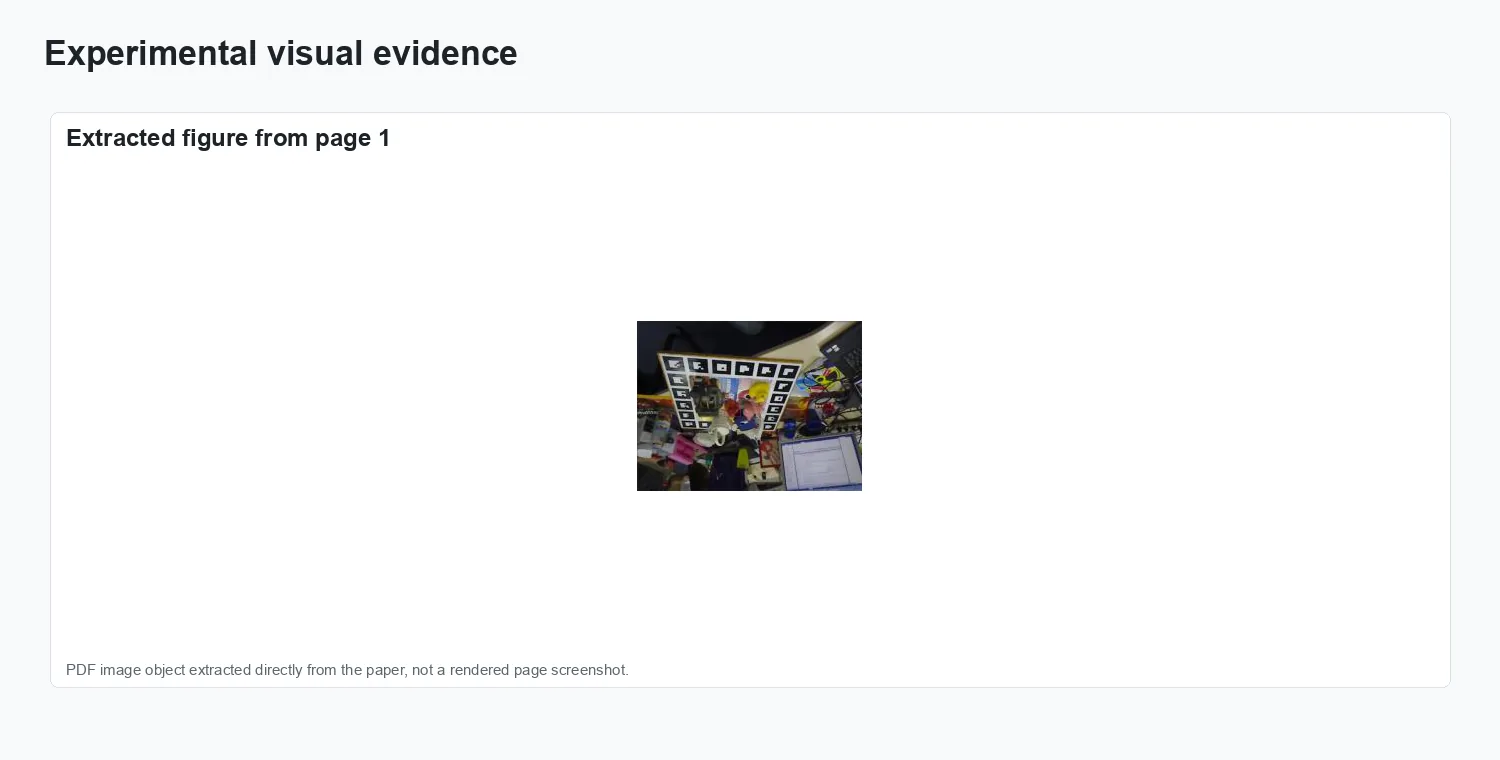
The visuals show the few-reference RGB-D object representation, sparse cross-view fusion, and benchmark pose-estimation results.
Method overview.
Representation and setup.
Experimental evidence.
Result comparison.
Additional visual result.
Results and impact
The evaluation reported in Proceedings of the Australasian Conference on Robotics and Automation (ACRA 2025) is summarized through the figures above.