Identifying frequency-domain operating deflection shapes and internal damage in structures using geometric vision method
This work connects geometric vision with structural health monitoring. Instead of measuring vibration with contact sensors at a few points, it uses a stereo high-speed camera system to estimate full-field operating deflection shapes (ODS) in the frequency domain and then uses those ODS fields to identify internal damage.
Problem setting
ODS analysis describes how a structure deforms under operation at different frequencies. Traditional sensors are accurate but contact-based and sparse, while vision systems can measure dense surface motion. The challenge is converting image motion into accurate frequency-domain structural response while controlling stereo calibration and matching errors.
Geometric vision workflow
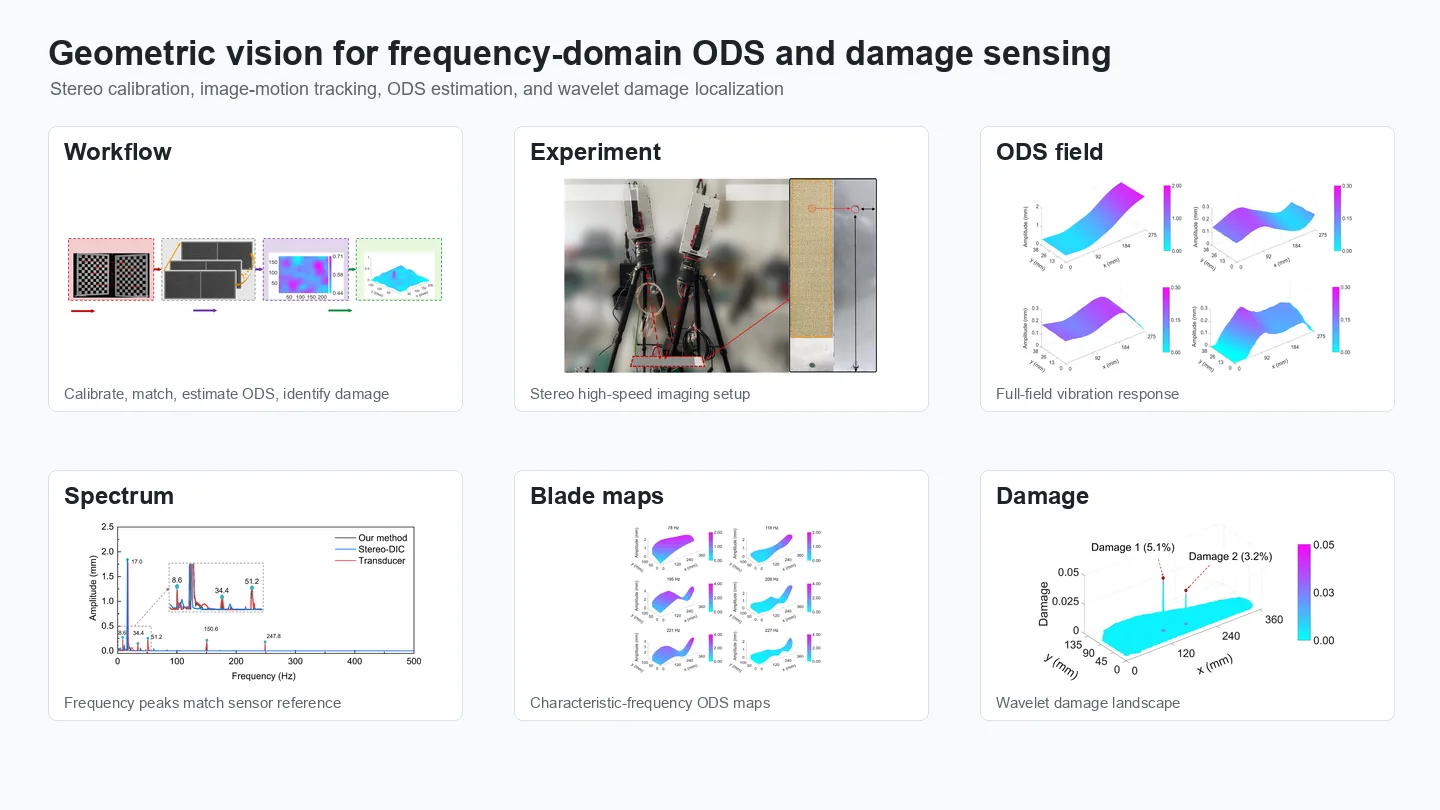
The proposed pipeline has four stages: RANSAC-based calibration of the stereo imaging system, stereo and temporal matching, ODS estimation, and damage identification. RANSAC is used to reduce the effect of imprecise calibration target points. Stereo rectification and a depth-parameterized model then make the ODS estimation more efficient.
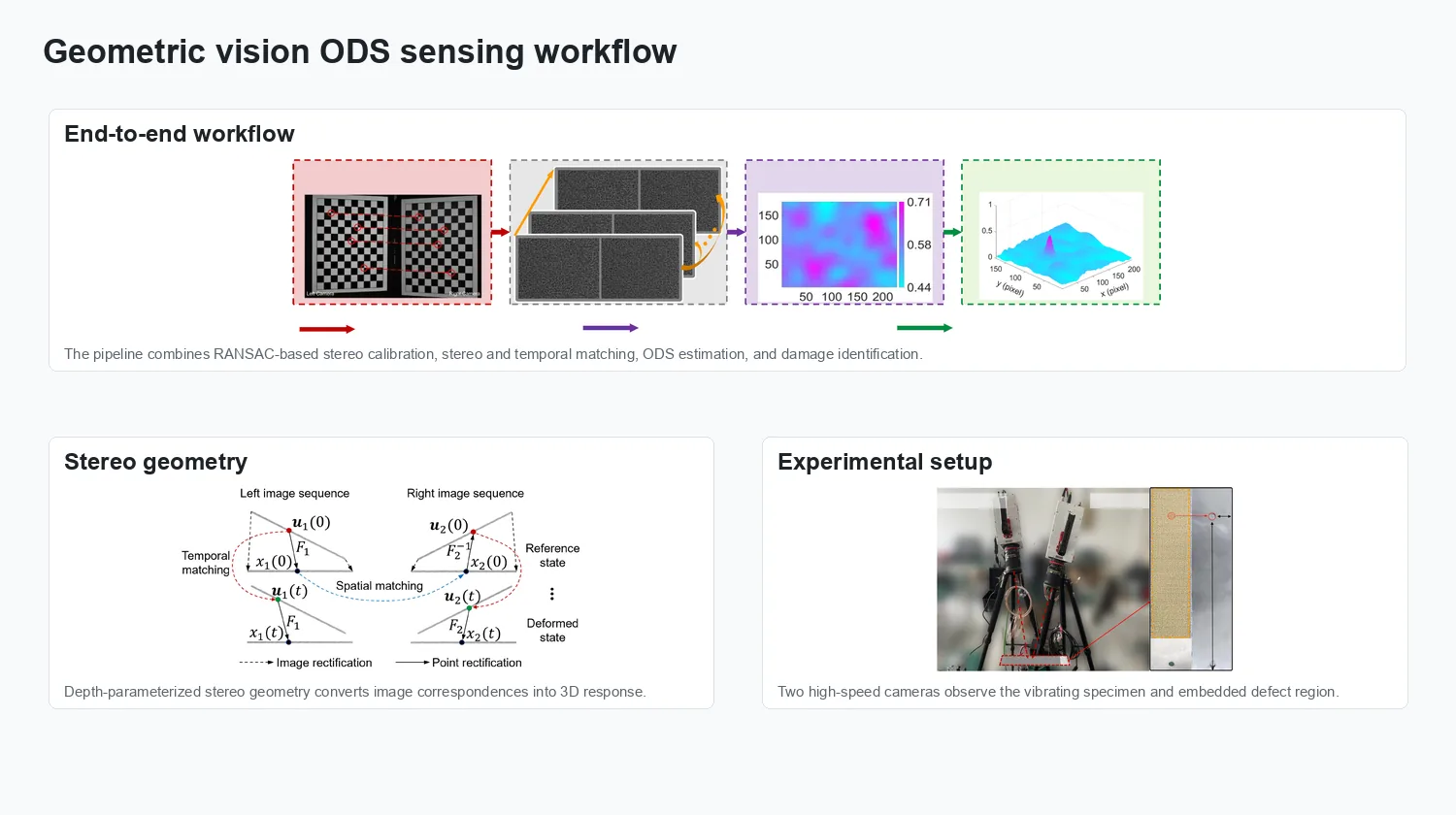
Workflow. The method calibrates the stereo system, tracks stereo-temporal image motion, estimates full-field ODS response, and identifies damage from the reconstructed ODS fields.
Calibration and ODS estimation
The method first builds stereo correspondences in a rectified reference state and then tracks the left and right image positions over time. This converts image-domain motion into state-vector changes. Applying Fourier transformation to those state vectors gives frequency-domain ODS response fields.
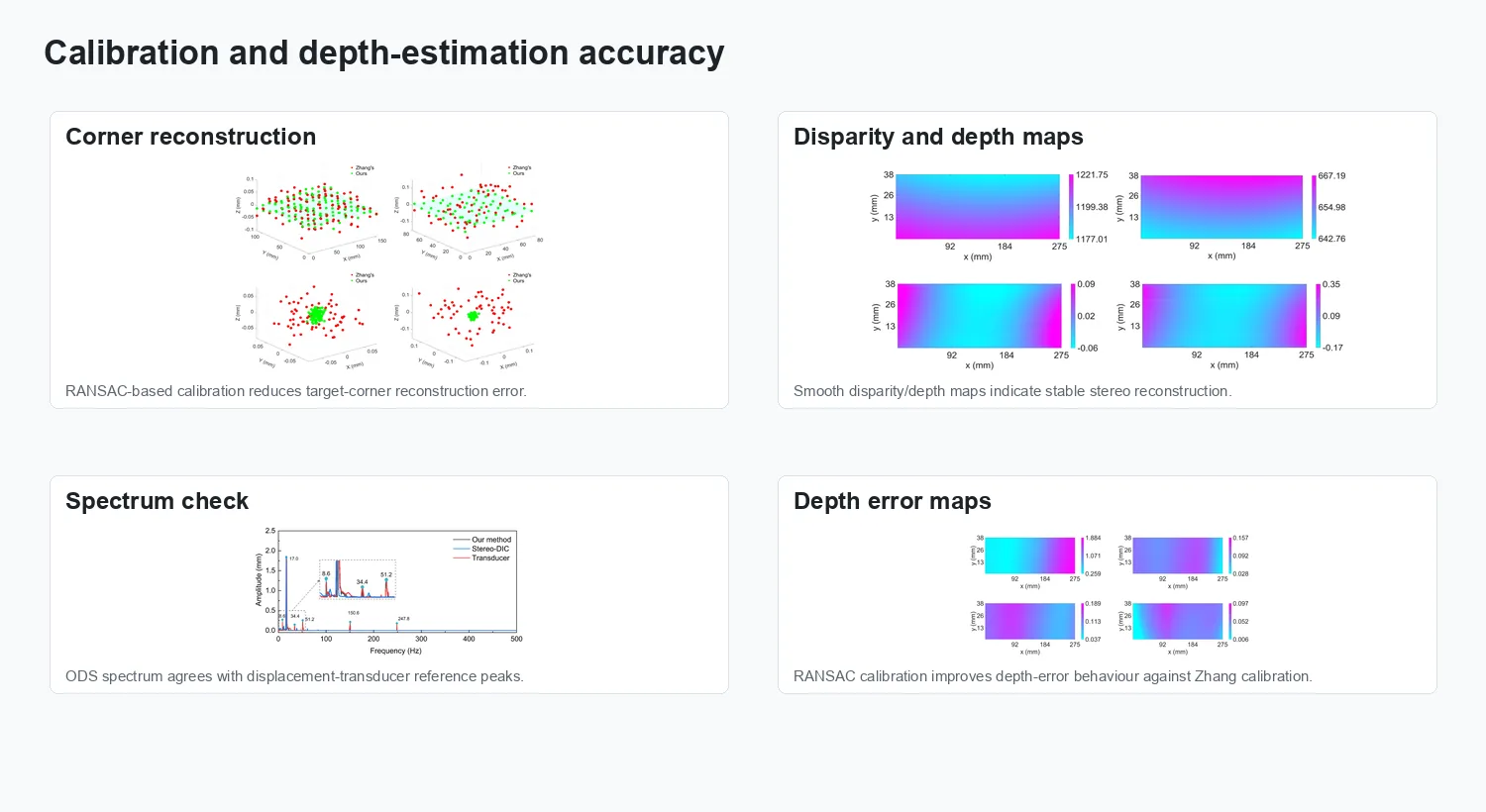
Calibration and spectrum validation. Extracted figures show calibration accuracy, depth/disparity maps, and agreement between vision-estimated ODS spectra and displacement-transducer measurements.
Frequency-domain ODS fields
The paper validates the ODS response at representative resonant frequencies. The vision-estimated spectra capture the same peaks as conventional references, and the corresponding full-field ODS maps visualize structural vibration patterns over the measured surface.
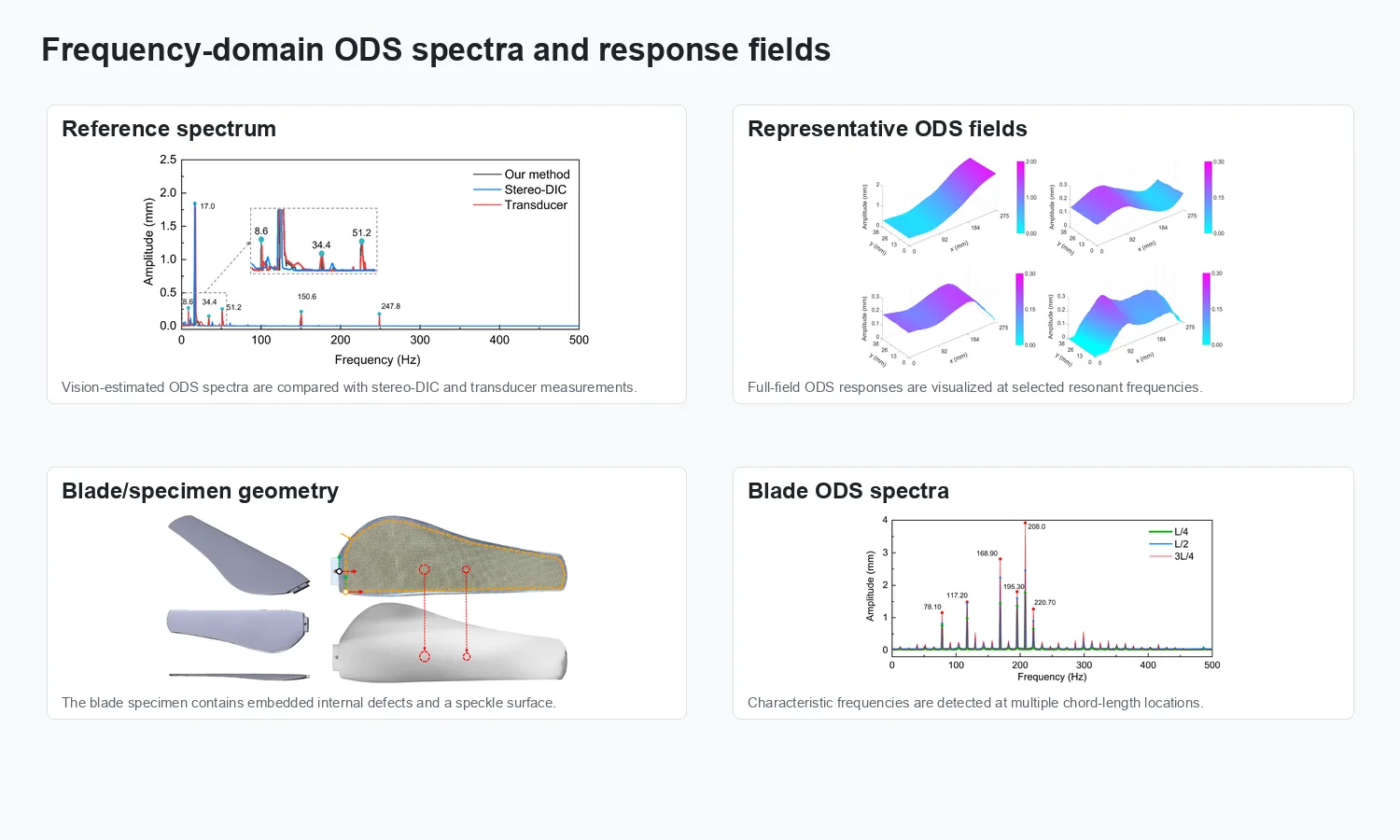
ODS analysis. The method estimates ODS spectra and full-field response maps, then applies the same framework to a blade-like specimen with embedded defects.
Damage identification
After ODS estimation, the method applies wavelet transformation on the ODS manifold in the reference image domain. This produces a damage landscape where peak responses indicate likely damage locations and damage degrees. The blade experiment includes multiple characteristic frequencies and two internal damage regions.
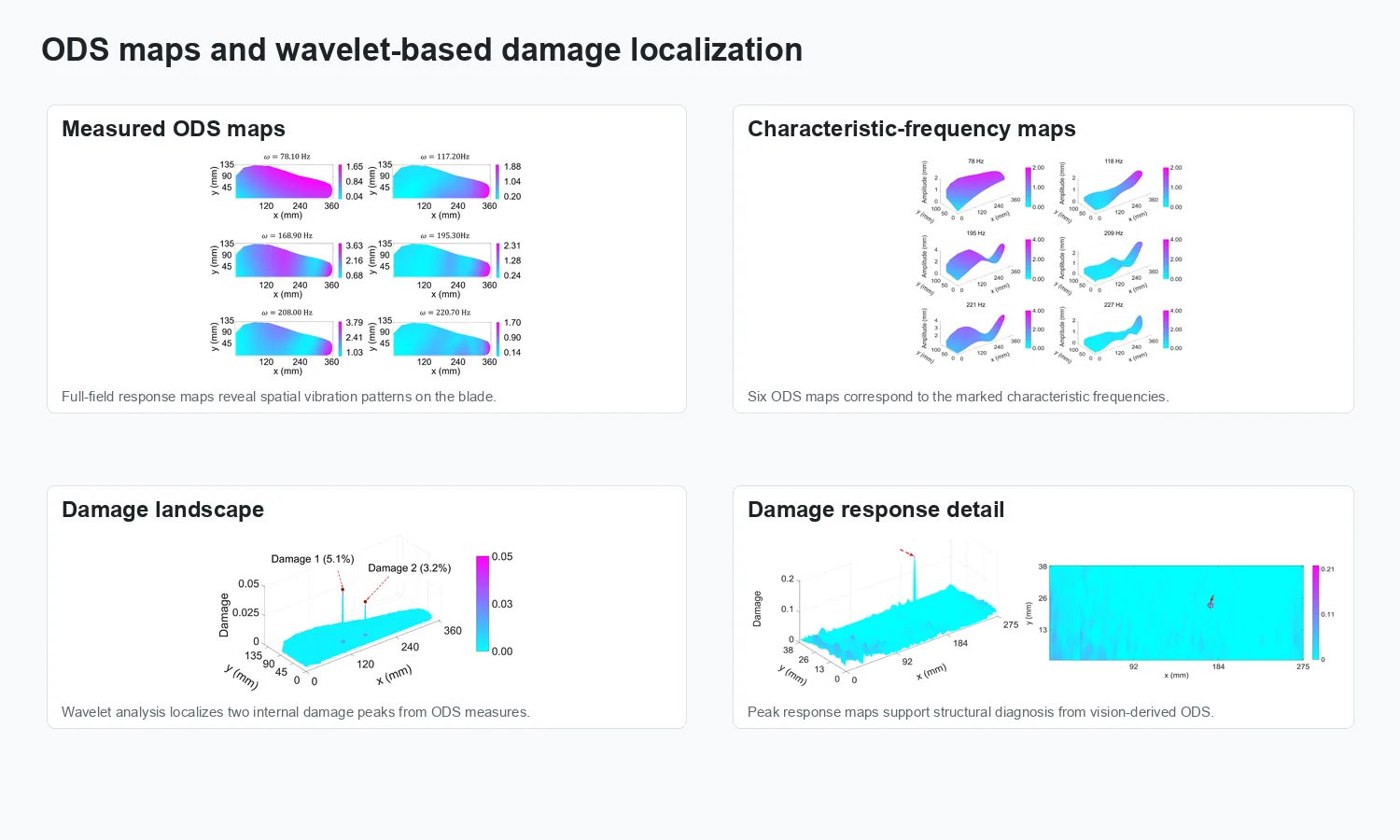
Damage localization. Characteristic-frequency ODS maps provide the vibration evidence used by the wavelet damage-identification stage.
Takeaway
The contribution is a dense, non-contact measurement pipeline that turns stereo image motion into frequency-domain structural diagnostics. It is especially relevant for in-service inspection, vibration analysis, and damage localization when sparse contact sensors are inconvenient or insufficient.