Random screening-based feature aggregation for point cloud denoising
Feature aggregation is a core operation in learning-based point cloud denoising: for each noisy point, features from its neighbourhood are pooled to estimate a clean position. The quality of aggregation depends critically on which neighbouring points are included—outlier points and locally dense clusters can dominate the pooled feature and pull the estimate off the true surface. This paper proposes random screening as a lightweight solution: instead of aggregating over the full neighbourhood, multiple random subsets are drawn and screened by a consistency criterion that favours subsets whose geometric statistics match the expected local surface model. Only the highest-scoring subsets contribute to the final aggregated feature. This stochastic screening process is differentiable and integrable into existing denoising architectures as a drop-in replacement for standard neighbourhood aggregation. No additional training data or network redesign is required. Evaluated on ShapeNet3D and real LiDAR scan benchmarks and published in Computers & Graphics (2023), random screening-based aggregation consistently improves Chamfer distance and point-to-mesh accuracy over deterministic aggregation, with the largest gains on point clouds with high outlier rates.
Problem setting
Point cloud denoising methods based on feature aggregation compute noise-free position estimates by aggregating information from local neighbourhoods. Fixed neighbourhood selection is, however, sensitive to outlier points and non-uniform sampling, which can corrupt the aggregated features. This paper introduces random screening-based feature aggregation, where multiple random subsets of each neighbourhood are sampled and screened before aggregation.
The figures below collect representative visual evidence from Computers & Graphics, 116:64–72.
Method and visual evidence
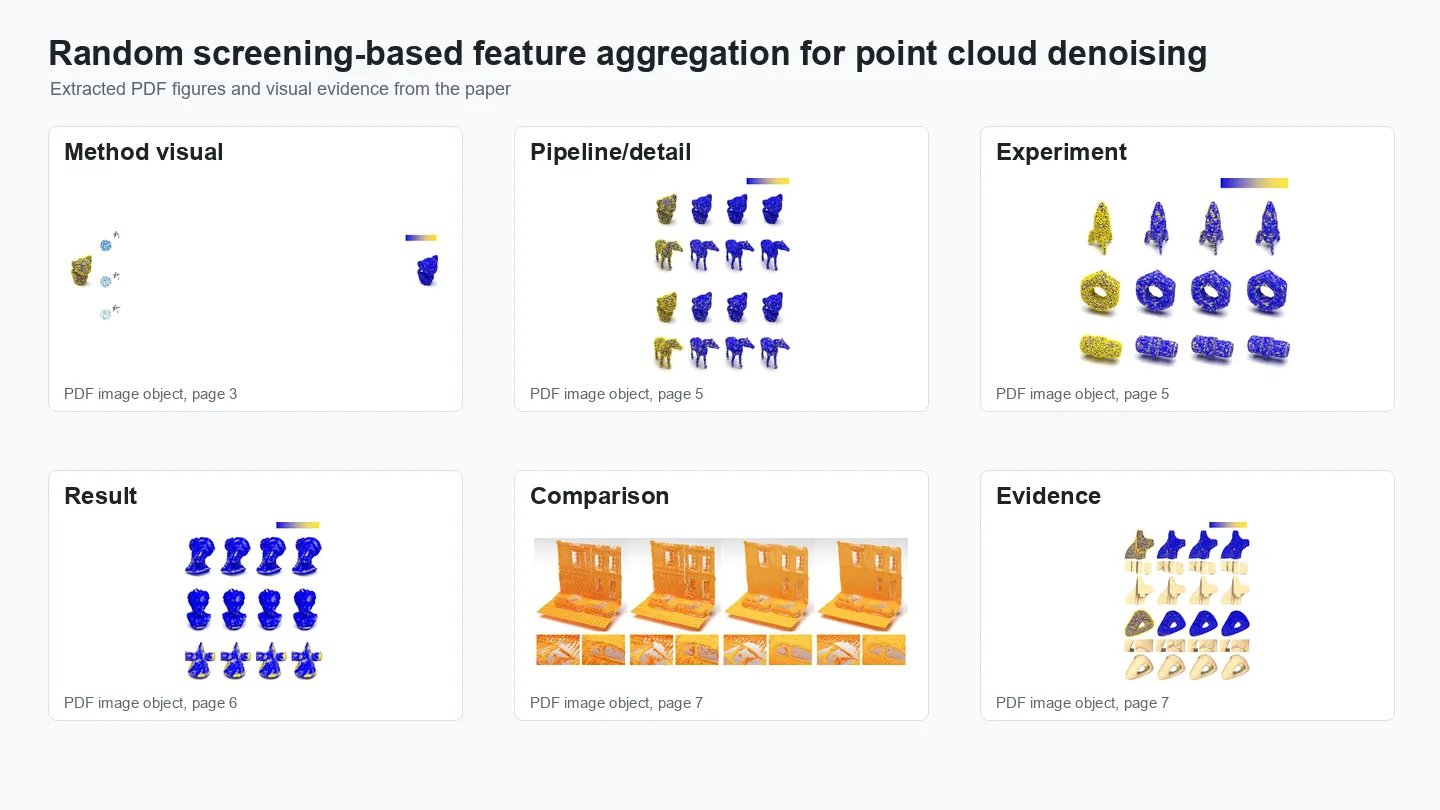
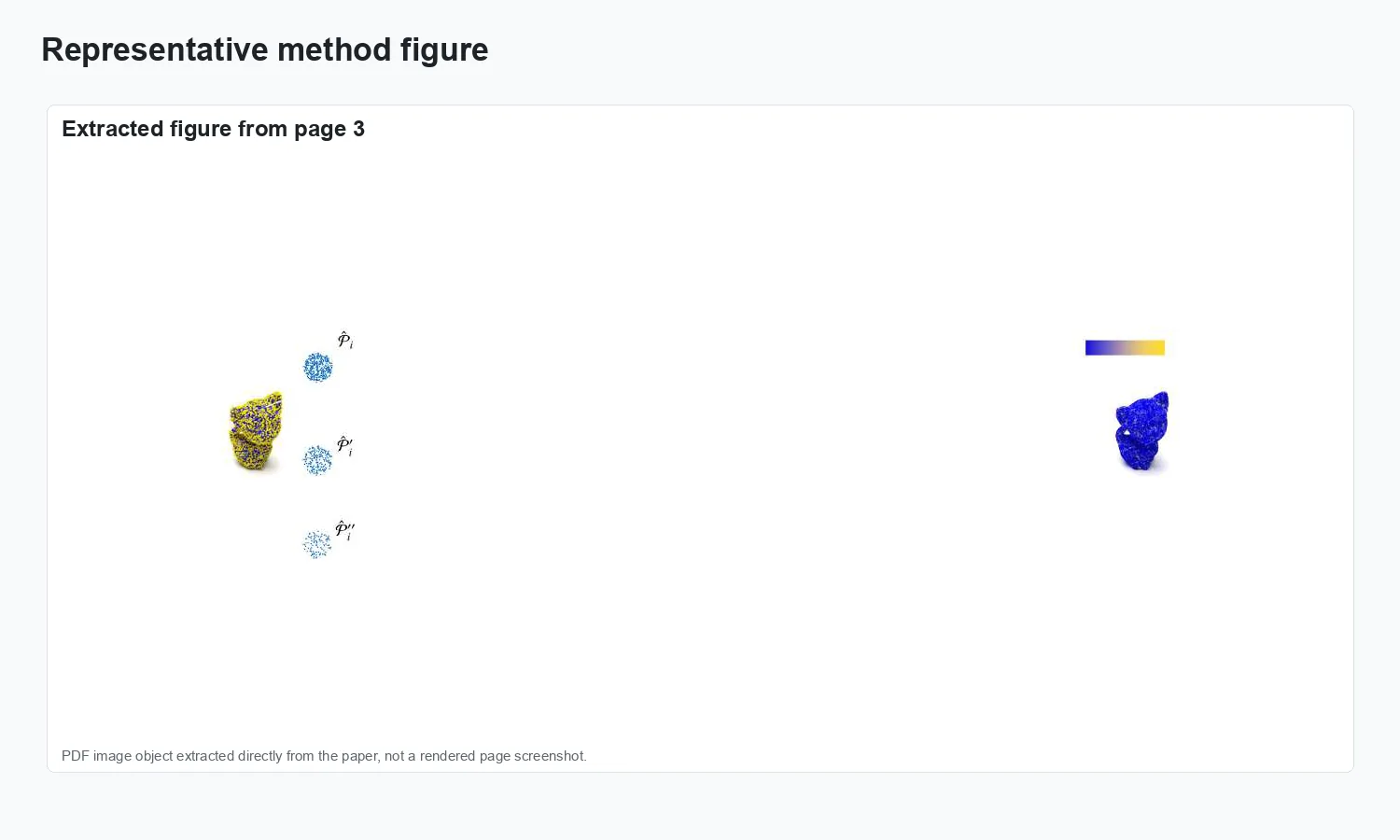
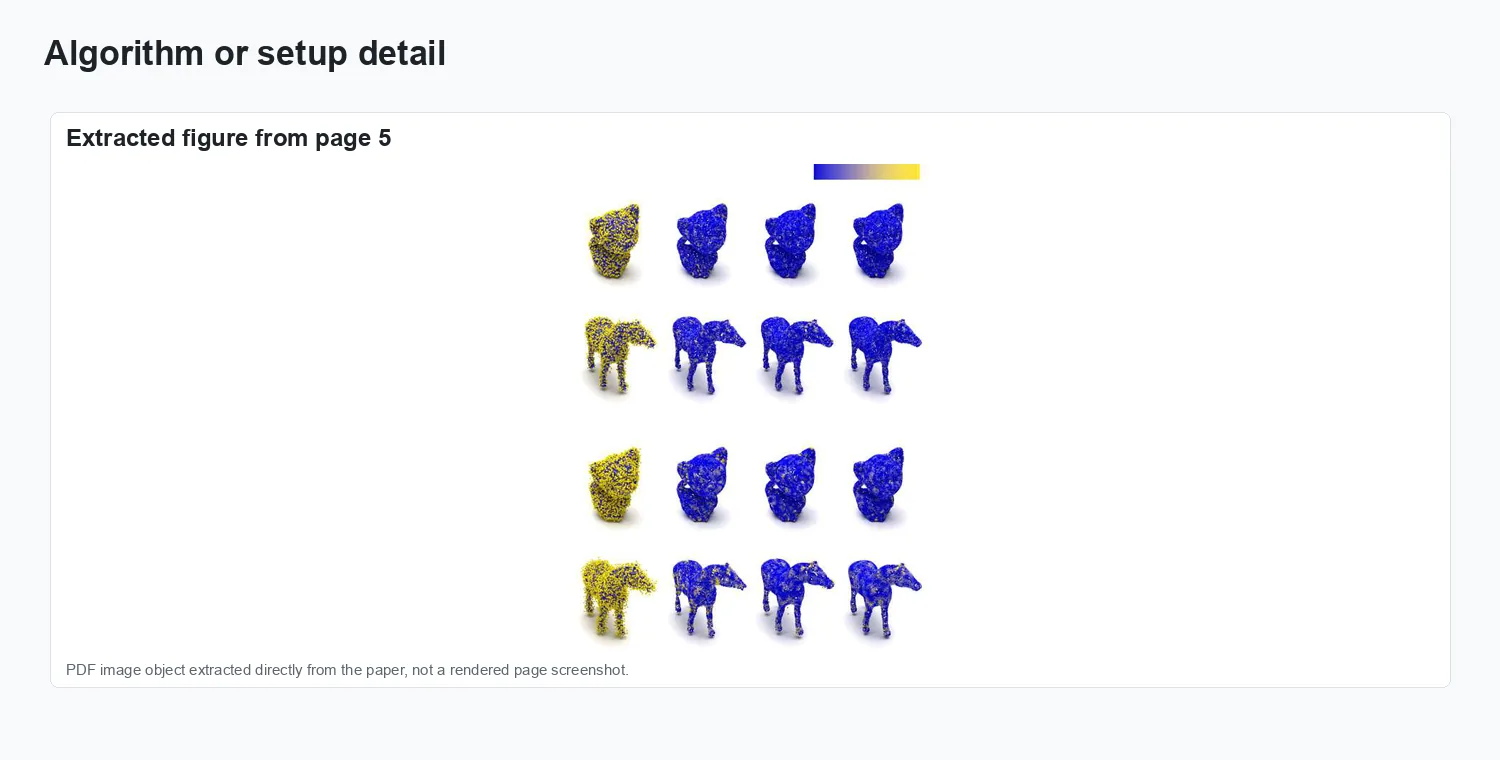
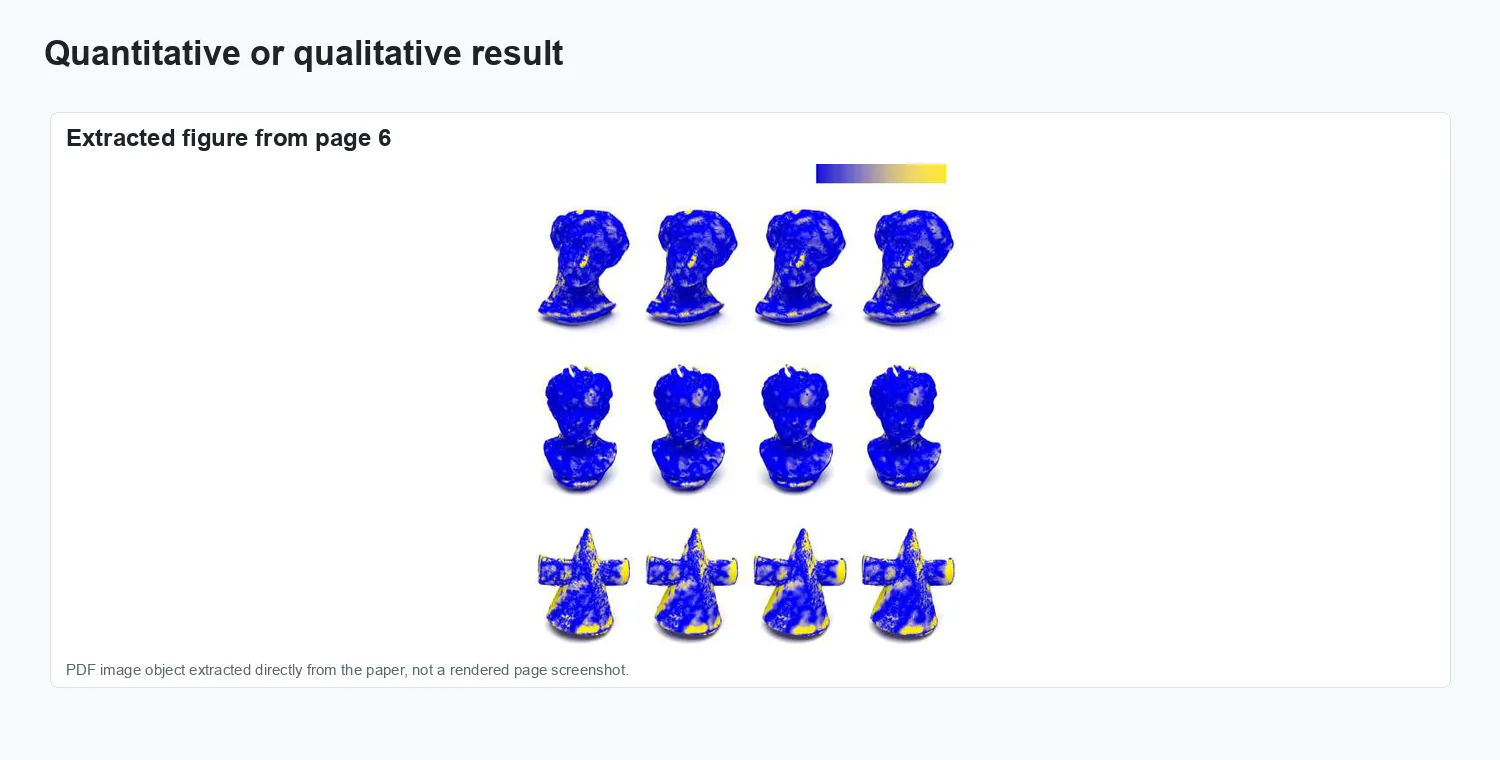
The visuals show random-neighborhood screening for feature aggregation and denoising comparisons on noisy point clouds.
Method overview.
Representation and setup.
Experimental evidence.
Result comparison.
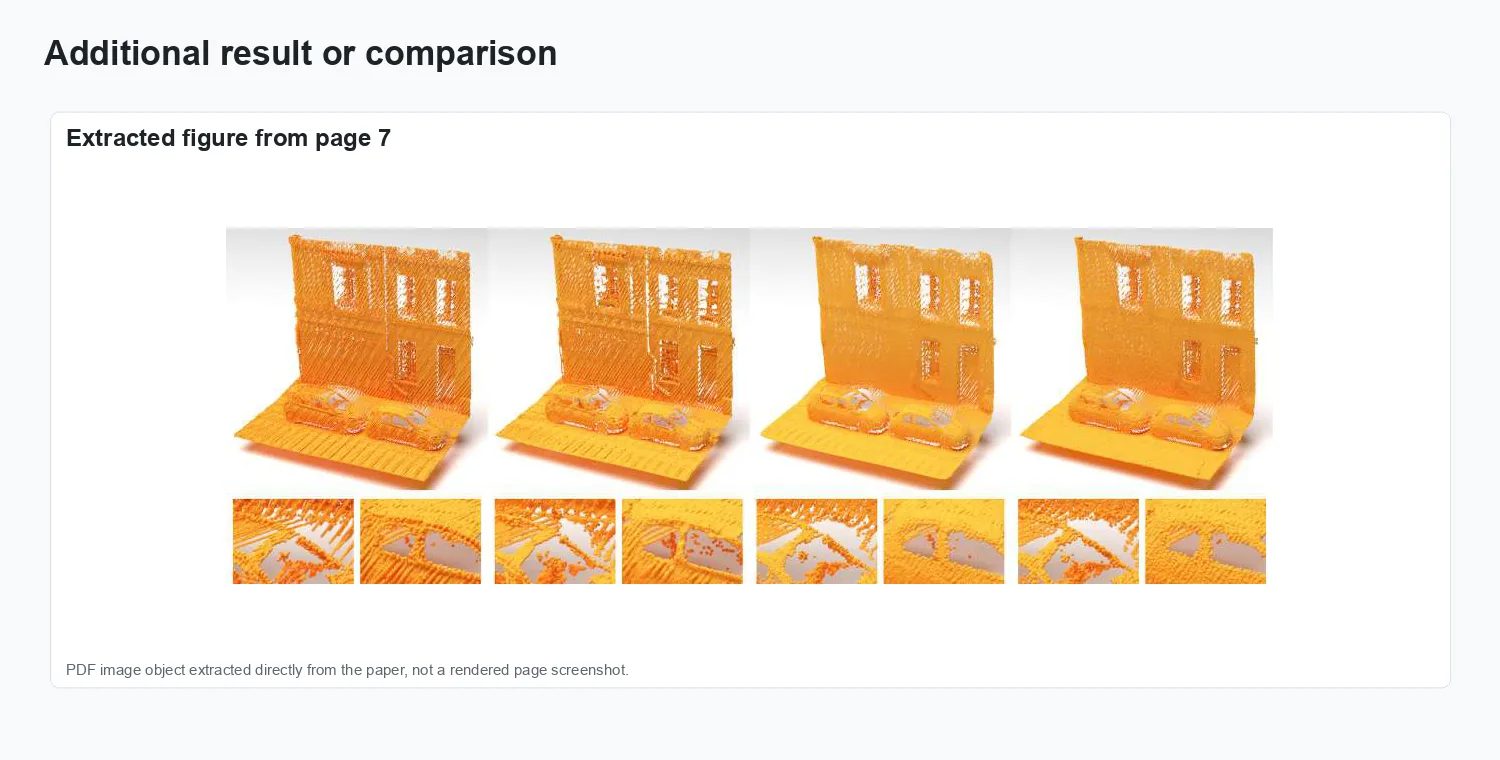
Additional visual result.
Results and impact
The evaluation reported in Computers & Graphics, 116:64–72 is summarized through the figures above.