Gaussian Curvature Filter on 3D Meshes
Curvature flow is a principled framework for mesh smoothing: by iteratively moving vertices in the direction of curvature, noise is removed and surfaces become fairer. The dominant variant, mean curvature flow, has a well-known drawback—it shrinks meshes toward zero volume and erases sharp features such as ridges and corners. This paper explores Gaussian curvature as an alternative foundation for mesh filtering. Gaussian curvature, unlike mean curvature, is intrinsic: it depends only on the distances within the surface itself and is invariant to isometric deformations such as bending. Preserving Gaussian curvature during filtering therefore naturally prevents volume collapse and protects topologically significant features. The proposed filter formulates vertex updates as minimising the deviation of the filtered mesh Gaussian curvature from the input, solved iteratively with a simple local update rule. No sharp feature detection or special boundary treatment is required. The filter is fast, easy to implement, and controlled by a single smoothing-strength parameter. Experiments on standard noisy mesh benchmarks (arXiv:2003.09178) show feature retention and volume preservation superior to mean curvature flow and competitive with dedicated feature-preserving methods, at lower implementation complexity.
Problem setting
Mesh denoising based on curvature flow is a classical approach to surface smoothing, but mean curvature flow shrinks volumes and blurs sharp features. This paper proposes a Gaussian curvature filter that iteratively updates vertex positions to match a target Gaussian curvature distribution, minimising changes to the intrinsic geometry of the surface. Gaussian curvature is an intrinsic quantity invariant to bending, so its preservation naturally avoids volume collapse and respects geometric features such as saddle points and convex corners.
The figures below collect representative visual evidence from arXiv:2003.09178.
Method and visual evidence
The visuals show how Gaussian curvature guides mesh smoothing while preserving intrinsic shape structure, volume, and sharp geometric details.
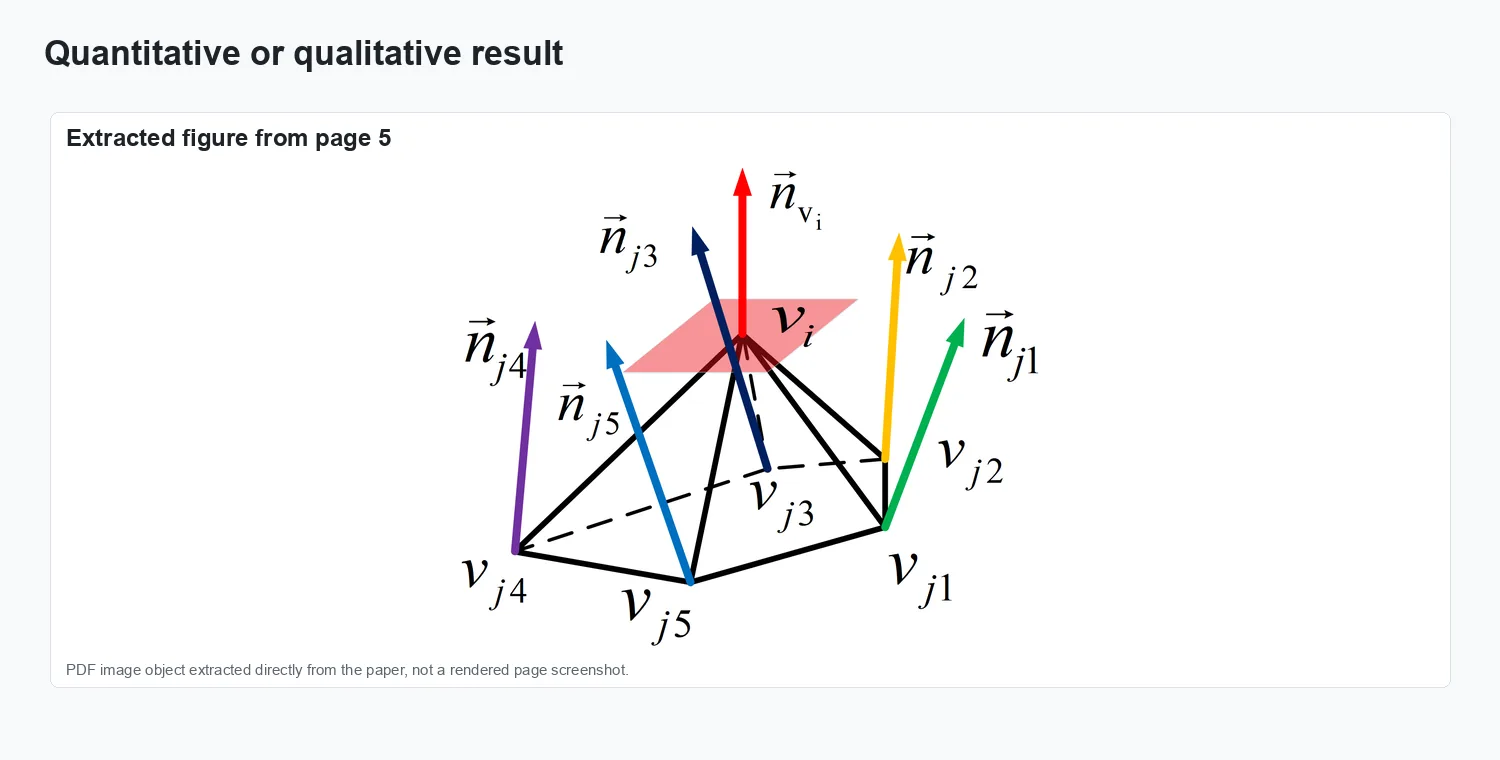
Method overview.
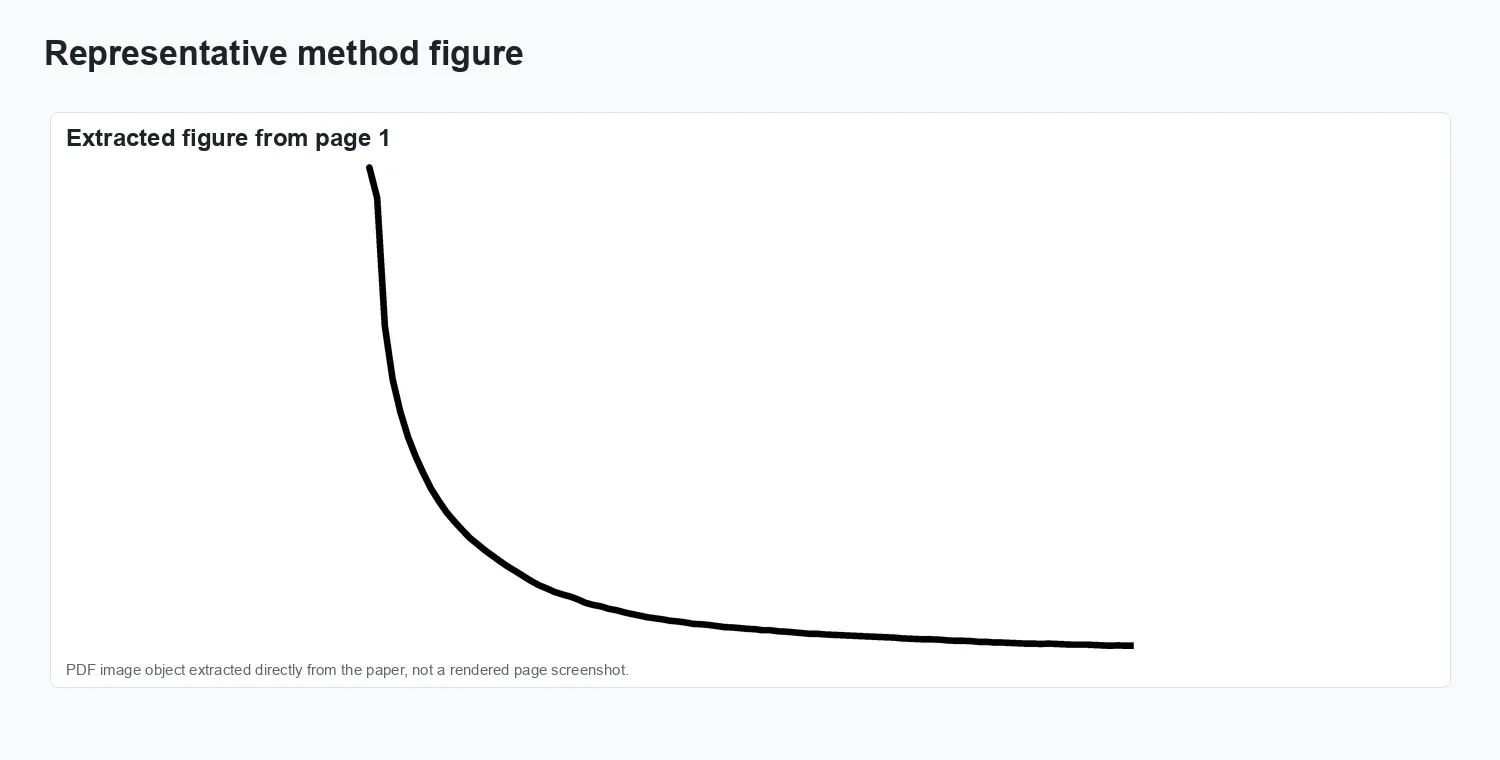
Representation and setup.
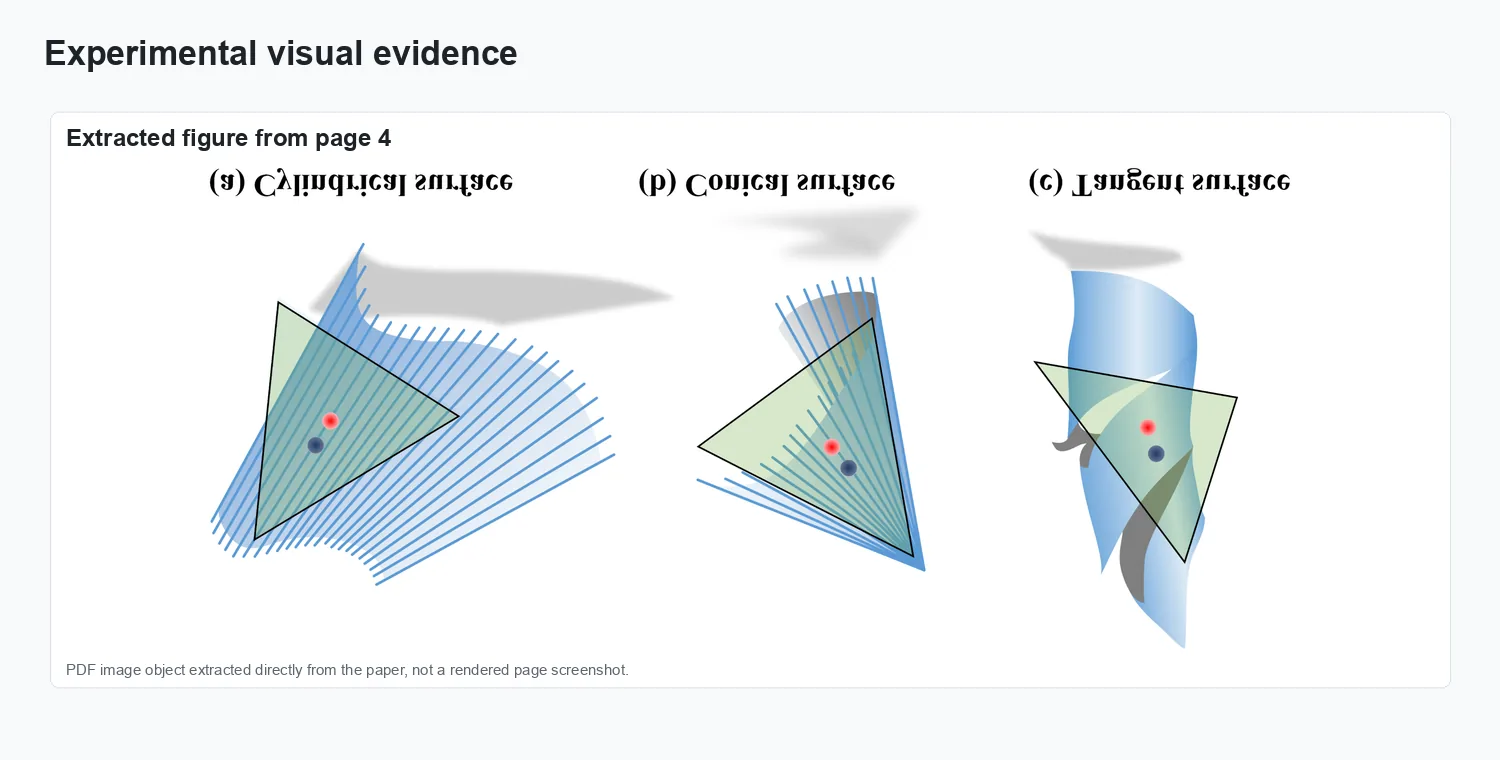
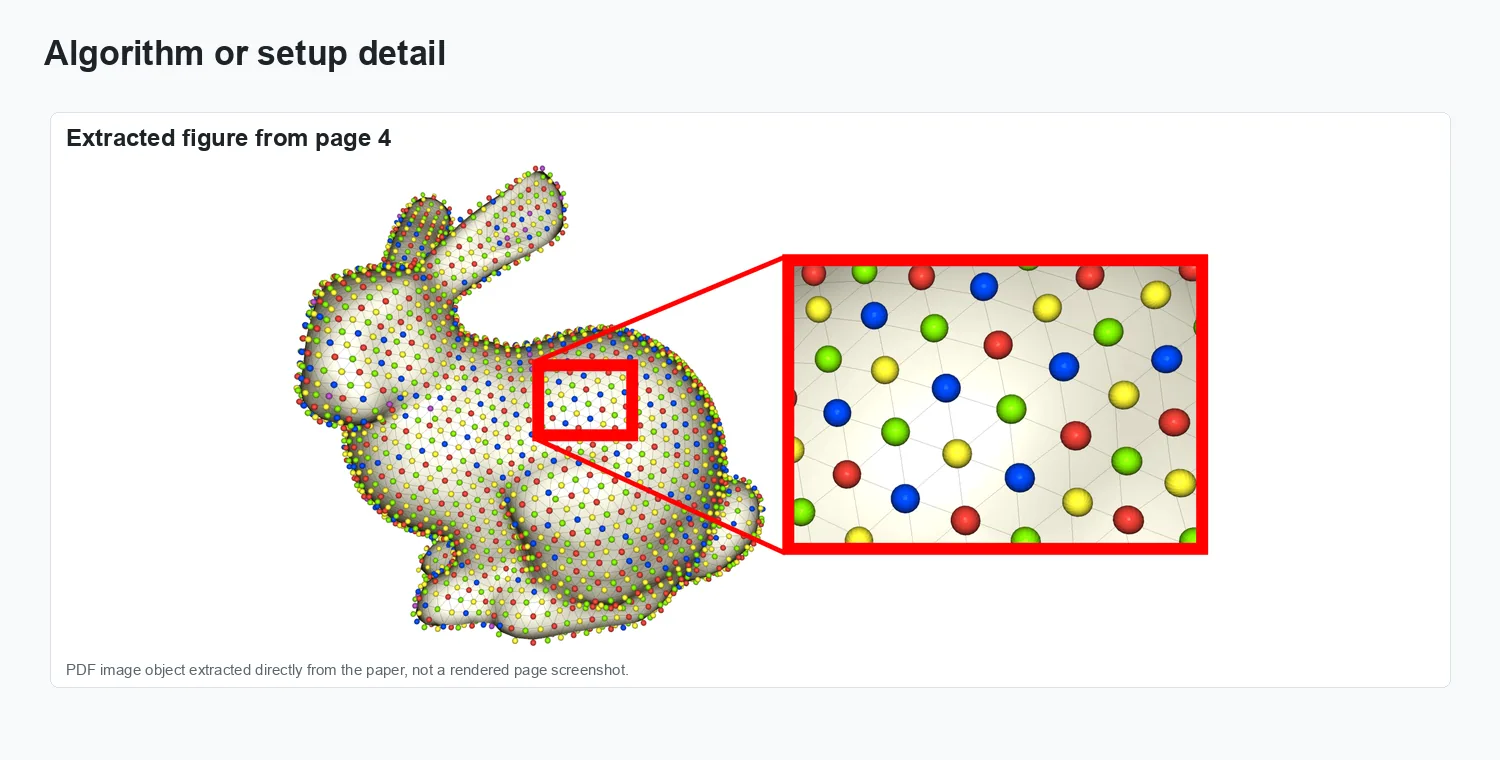
Experimental evidence.
Result comparison.
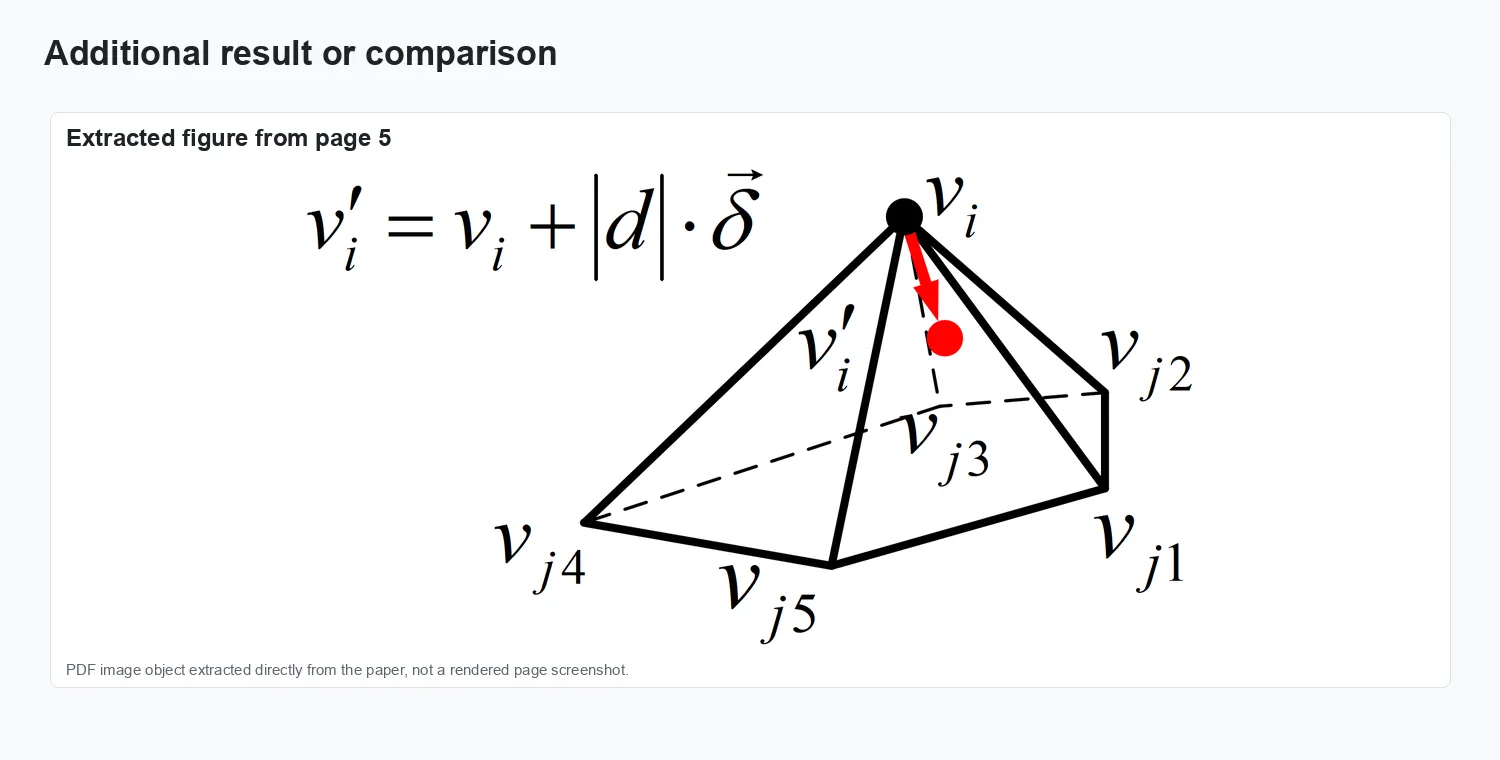
Additional visual result.
Results and impact
The evaluation reported in arXiv:2003.09178 is summarized through the figures above.