Pick-and-place process sequencing for transformation of rasterized 3D structures
We present an optimization method for process sequencing in automated assembly of three-dimensional physical structures comprised of uniform elements using robotic equipment. This is part of a process of large-scale construction based on a pick-and-place (PnP) assembly approach. We show that PnP process sequencing is a kind of assignment problem that can be solved by the Hungarian method. The approach adopted in the strategy may be generalized in different application-dependent scenarios, such as from crane operations to large scale 3D printing.
This journal page also groups the earlier CAD'15 conference version, which introduced the Hungarian-method moving-sequence formulation for pick-and-place transformation.
Problem setting
We present an optimization method for process sequencing in automated assembly of three-dimensional physical structures comprised of uniform elements using robotic equipment. This is part of a process of large-scale construction based on a pick-and-place (PnP) assembly approach. We show that PnP process sequencing is a kind of assignment problem that can be solved by the Hungarian method.
The figures below collect representative visual evidence from Automation in Construction, 75:56–64.
Method and visual evidence
The figures below summarize the paper’s workflow and representative visual evidence.
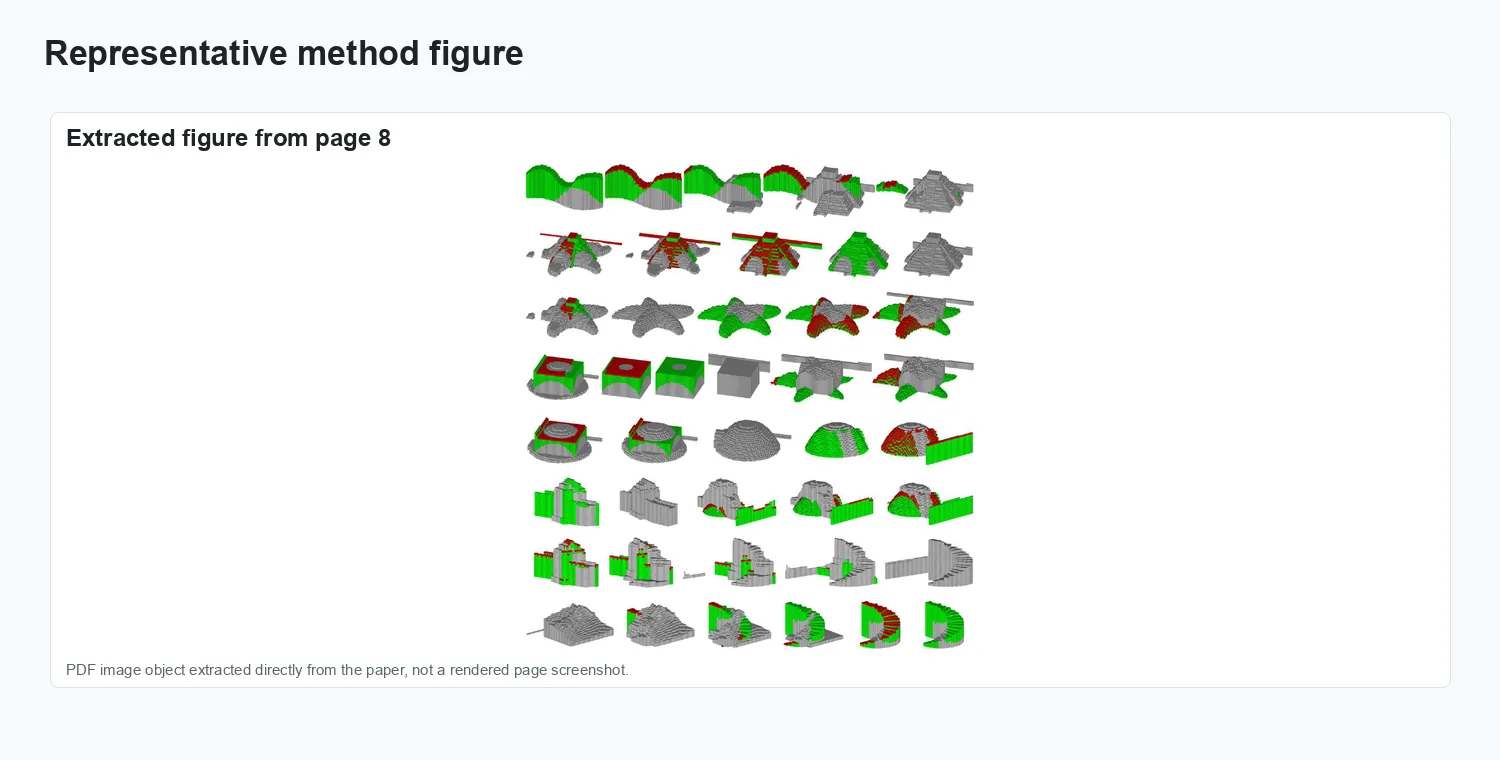
Method overview.
Results and impact
The evaluation reported in Automation in Construction, 75:56–64 is summarized through the figures above.