Underwater structured-light 3D imaging method based on FP-DiffNet
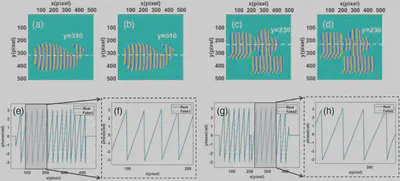
Underwater structured-light measurement is difficult because projected fringes are weakened, scattered, and geometrically distorted before they reach the camera. The resulting fringe blur and aliasing directly affect phase recovery and 3D reconstruction.
Algorithm principle
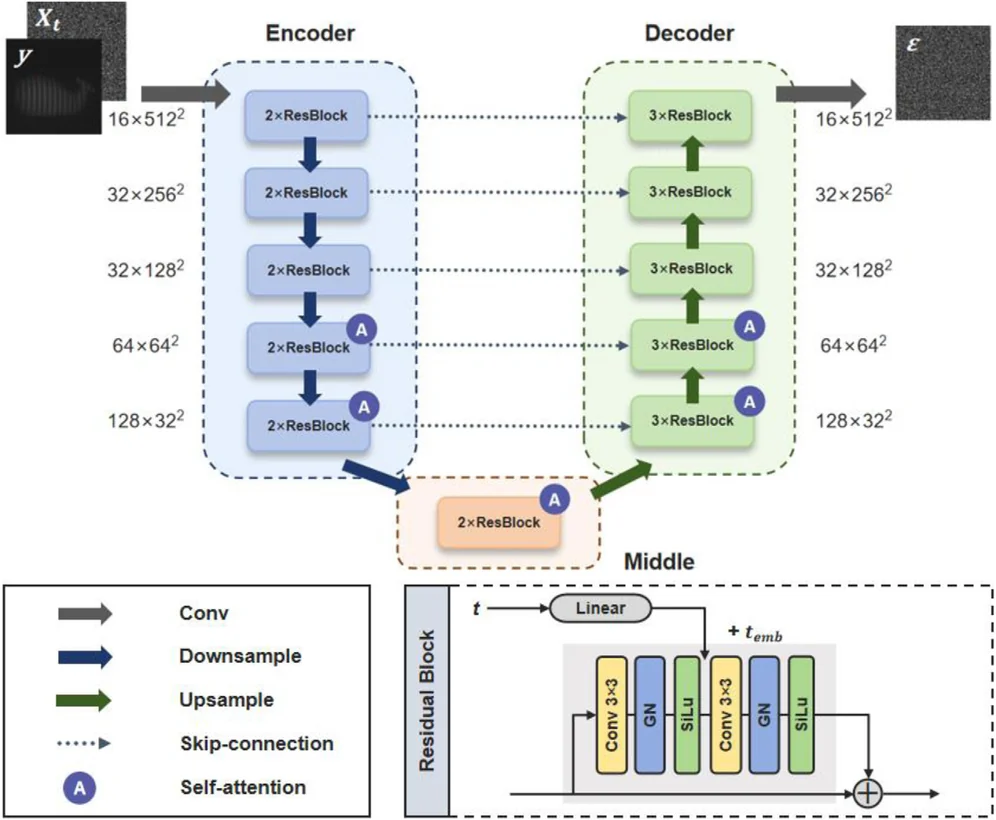
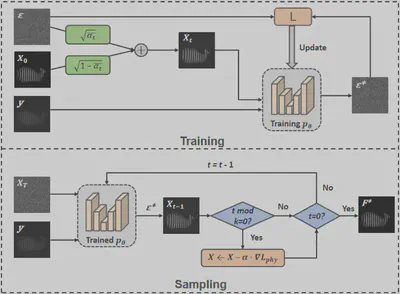
FP-DiffNet places a learned fringe-restoration stage before phase reconstruction. Instead of treating underwater degradation as a fixed filter problem, it models restoration as an iterative denoising process in a diffusion framework. A U-Net backbone learns to recover fringe structures damaged by attenuation, scattering, and refraction, while physics-guided constraints and adaptive noise annealing help preserve fringe phase information during the reverse diffusion process.
Measurement setting
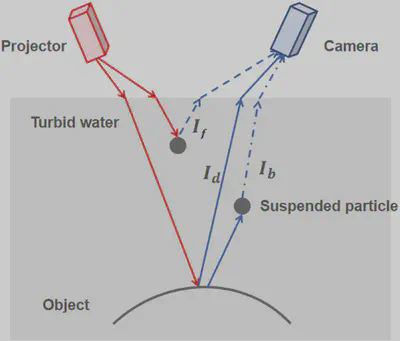
The paper focuses on submerged objects where attenuation, scattering, and refraction act together. This is a harder setting than ordinary air-based fringe projection because the captured patterns can lose contrast and develop local ambiguity before phase unwrapping.
Representative figures

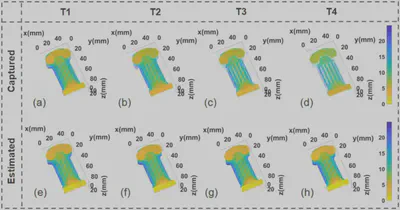
Results and impact
The evaluation in Applied Optics reports fringe-image quality, wrapped-phase accuracy, and 3D reconstruction accuracy. Under extremely high turbidity, FP-DiffNet reaches 42.42 dB PSNR and 0.0354 rad wrapped-phase MAE, and the full structured-light pipeline achieves 3D reconstruction RMSE below 0.1 mm. The practical value is a structured-light pipeline that remains usable in underwater inspection and scientific measurement tasks where clean fringe capture is not available.