Automated reconstruction of multiple objects with individual movement based on PSP
Phase-shifting profilometry (PSP) is a workhorse 3D measurement technique in industrial inspection, but its multi-frame capture requirement means that object motion degrades reconstruction quality. When multiple objects move independently—as on a conveyor belt with separated parts—the problem is compounded: each object has a different motion trajectory, and a single global motion model cannot compensate for all of them simultaneously. This paper presents an automated multi-object PSP reconstruction pipeline. Foreground objects are detected and segmented in each fringe frame using appearance and motion cues, and individual motion trajectories are estimated per object across the fringe sequence. Motion compensation is then applied per object before phase recovery, enabling accurate 3D reconstruction of each part despite its independent movement. Crucially, the pipeline is fully automated: it requires no prior knowledge of how many objects are present or how they move, making it directly deployable on dynamic industrial scenes. Published in Optics Express (2020), the method is demonstrated on multi-object scenarios with diverse, uncorrelated motion patterns, significantly reducing motion-induced reconstruction error compared to single-object or global motion correction approaches.
Problem setting
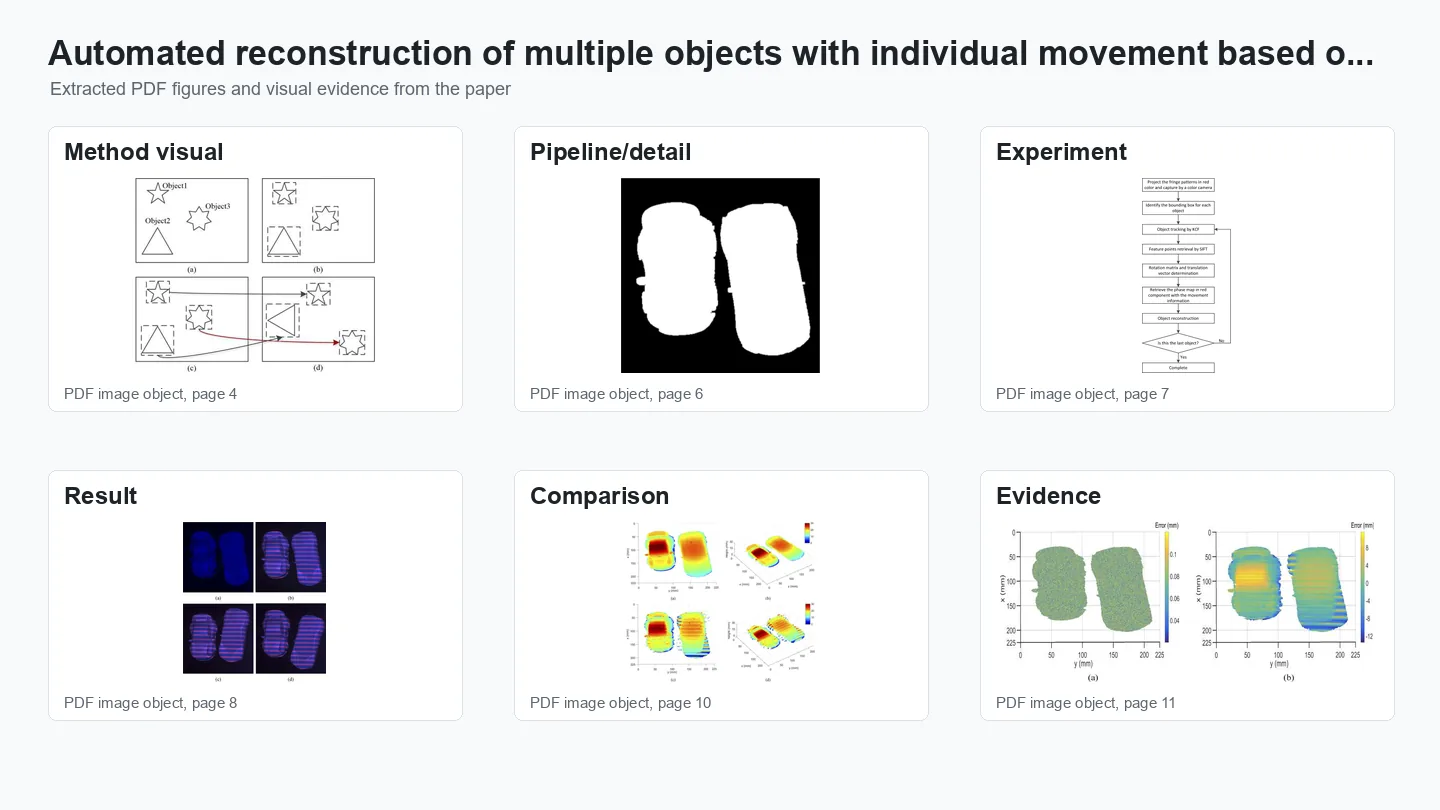
Reconstructing multiple objects that move independently during phase-shifting profilometry (PSP) capture is challenging because standard PSP assumes a static scene: motion of any object corrupts its phase estimate and can also contaminate neighbouring objects. This paper presents an automated pipeline that detects and tracks multiple independently moving objects in the PSP fringe sequence, estimates each object motion separately, and applies per-object motion compensation before phase recovery. The result is an automated system capable of simultaneously reconstructing accurate 3D shapes of multiple moving objects without manual intervention or prior knowledge of object count.
The figures below collect representative visual evidence from Optics Express, 28(19):28600–28611.
Method and visual evidence
The figures below summarize the paper’s setup, signal flow, and visual evidence.
Method overview.

Representation and setup.
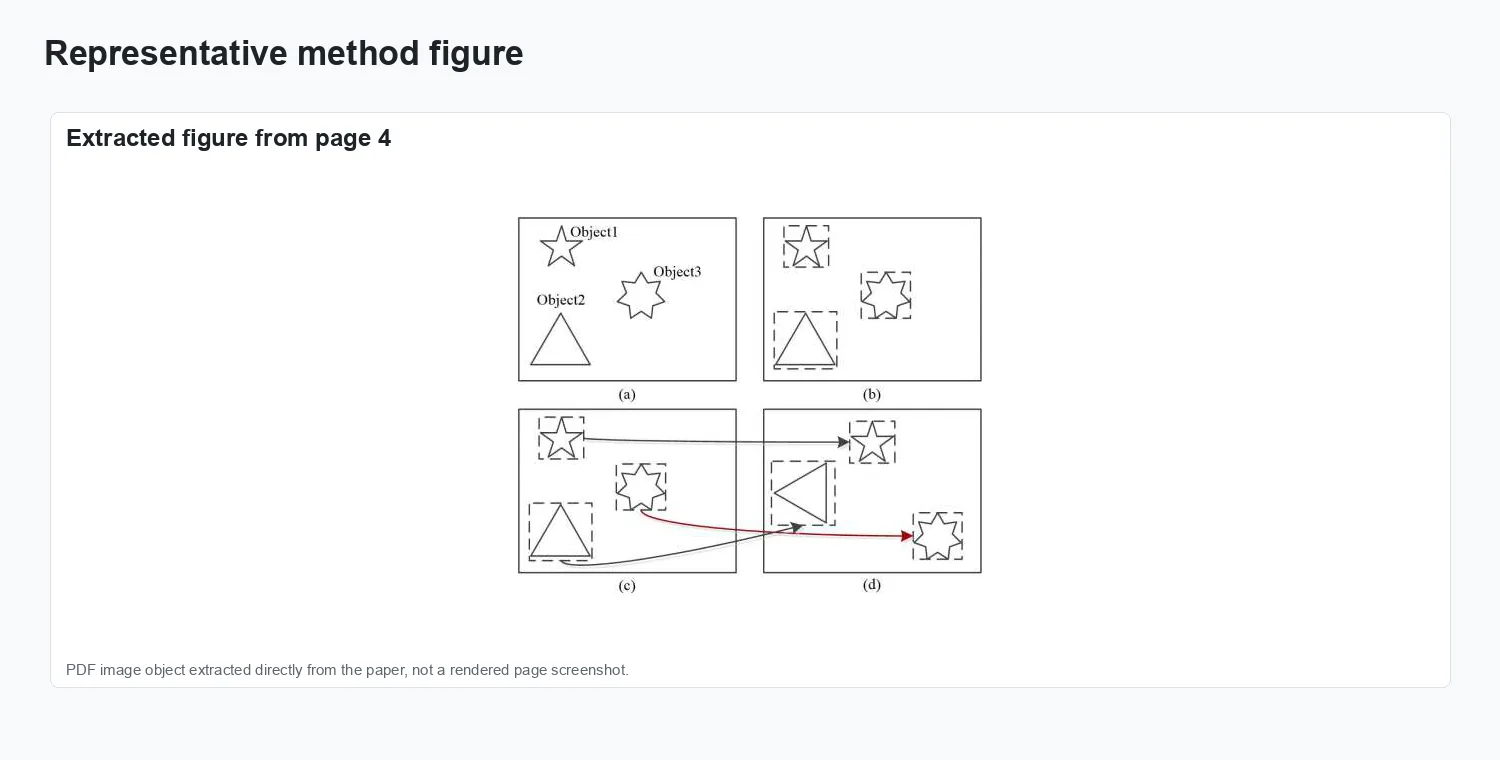
Experimental evidence.
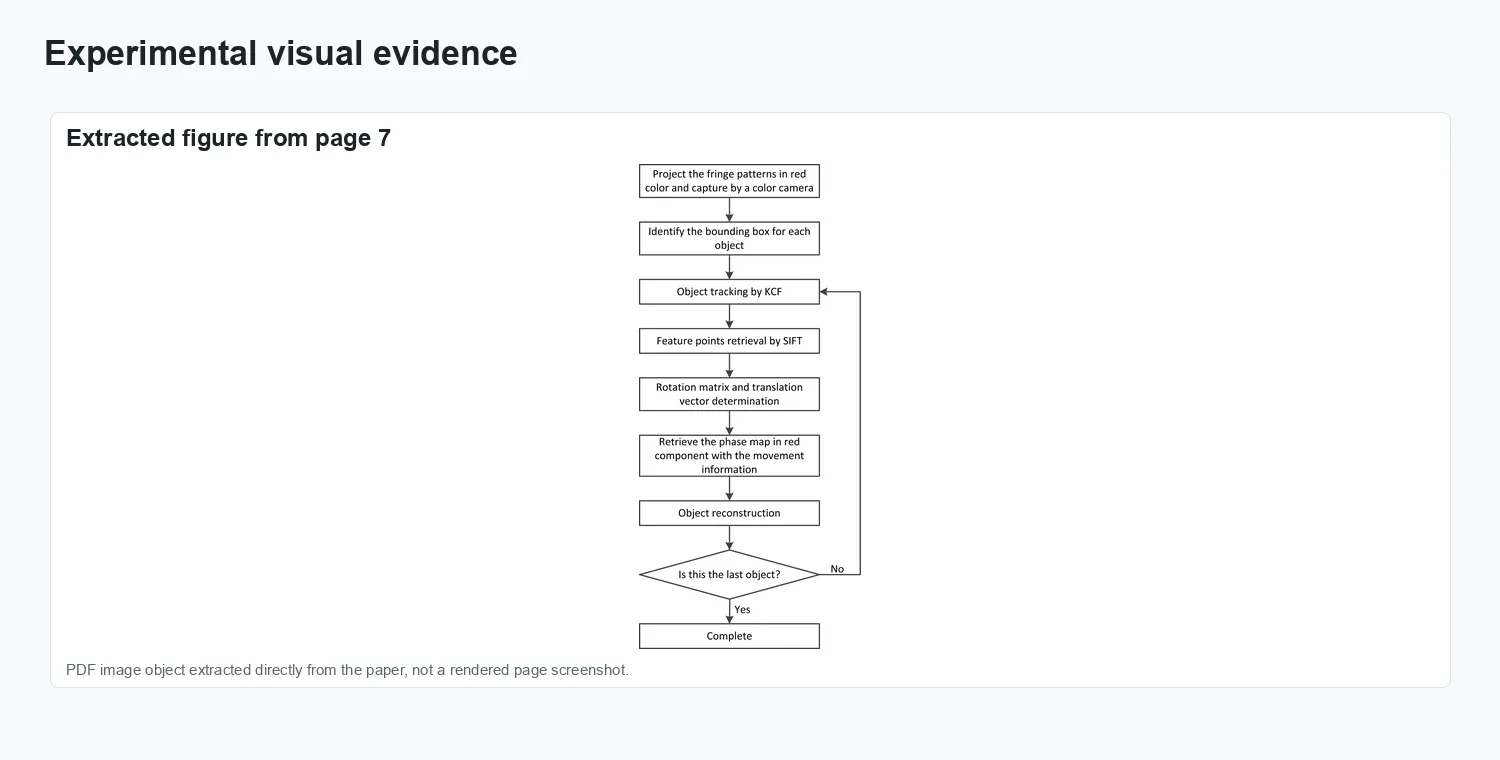
Result comparison.
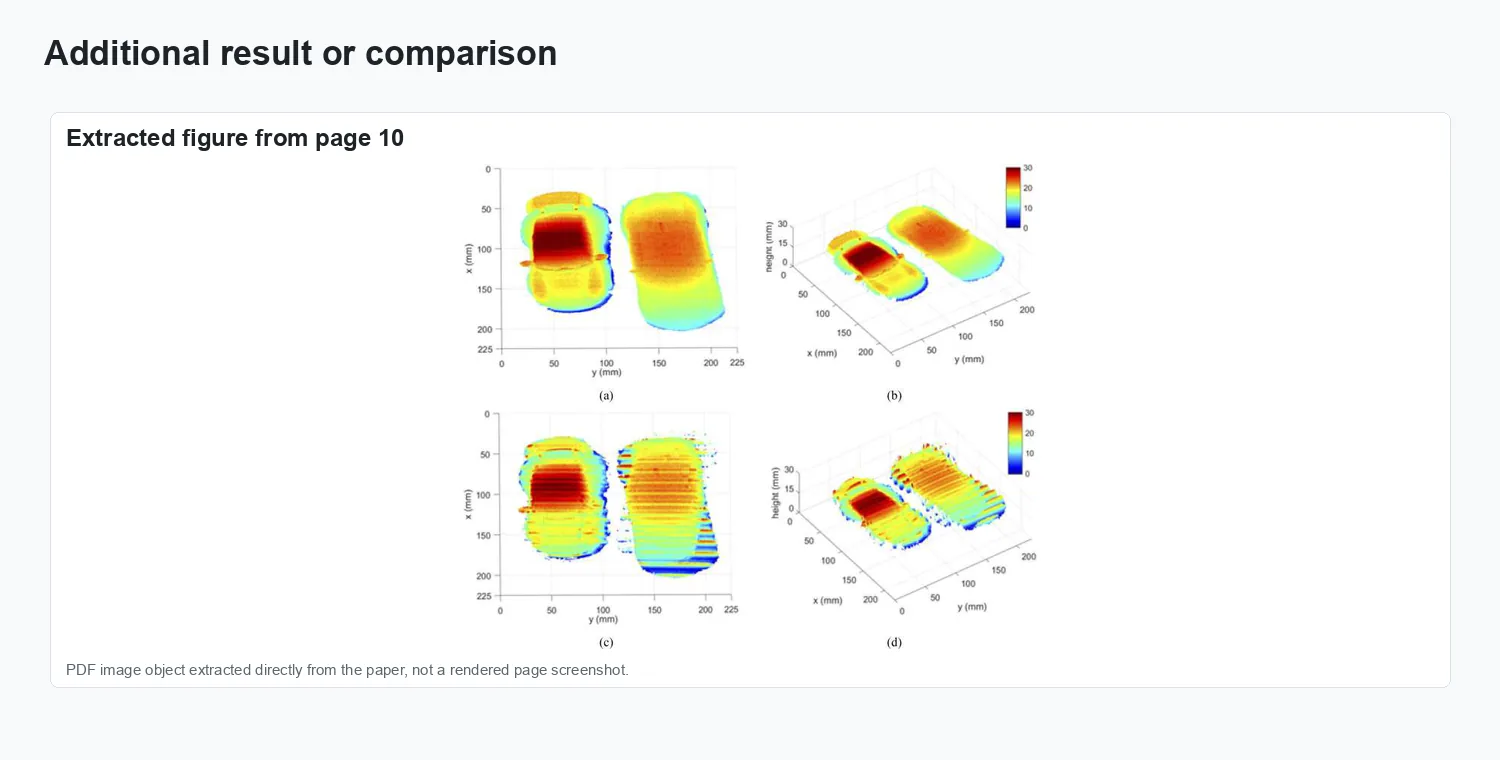
Additional visual result.
Results and impact
The evaluation reported in Optics Express, 28(19):28600–28611 is summarized through the figures above.