Towards uniform point distribution in feature-preserving point cloud filtering
Point cloud filtering must balance two competing objectives: suppressing noise while keeping sharp edges and corners intact. Methods that prioritise feature preservation typically allow point positions to cluster near high-curvature regions, producing non-uniform densities that degrade downstream applications such as surface reconstruction, rendering, and registration. This paper makes the observation that uniformity and feature preservation can be simultaneously achieved by decoupling the two objectives into complementary optimisation terms. A normal-guided feature detection step classifies each point as belonging to a sharp feature, a flat region, or a smooth curve, and assigns an appropriate filtering kernel. A spatial regularisation term then repels neighbouring points that have drifted too close together while attracting those that are too sparse, independently of the feature labels. The joint optimisation converges to filtered point clouds that are both feature-sharp and spatially uniform. Validated on ShapeNet and scanned real-world objects and published in Computational Visual Media (2023), the method outperforms dedicated feature-preserving and uniformity-enforcing baselines in isolation, and is particularly beneficial as a pre-processing step before Poisson surface reconstruction.
Problem setting
Feature-preserving point cloud filtering removes acquisition noise while retaining sharp geometric features such as edges and corners. However, most existing methods do not control the spatial distribution of filtered points, often producing uneven sampling densities: points cluster near sharp features while flat regions become sparse. This paper proposes a filtering approach that jointly optimises for feature preservation and uniform spatial distribution.
The figures below collect representative visual evidence from Computational Visual Media, 9(2):249–263.
Method and visual evidence
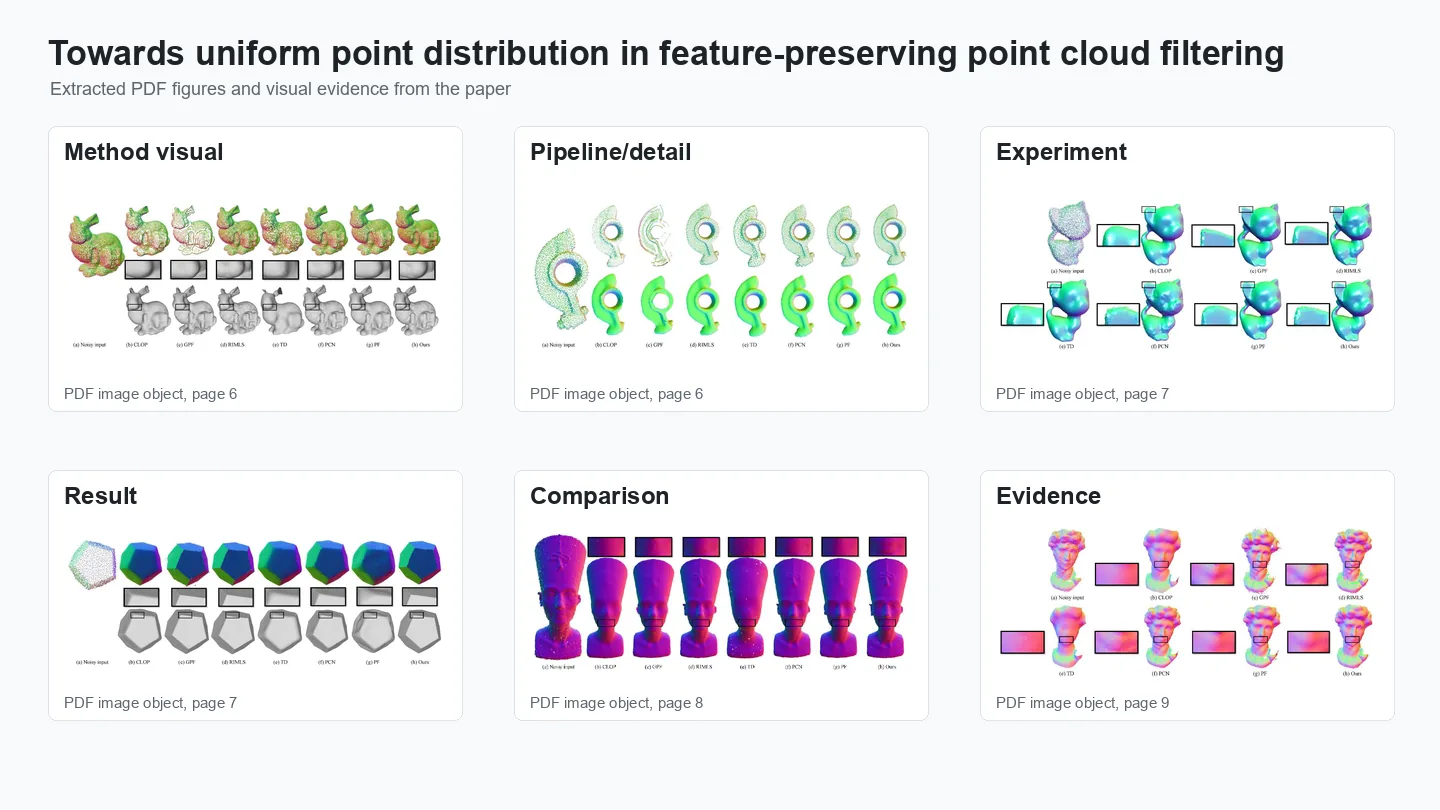
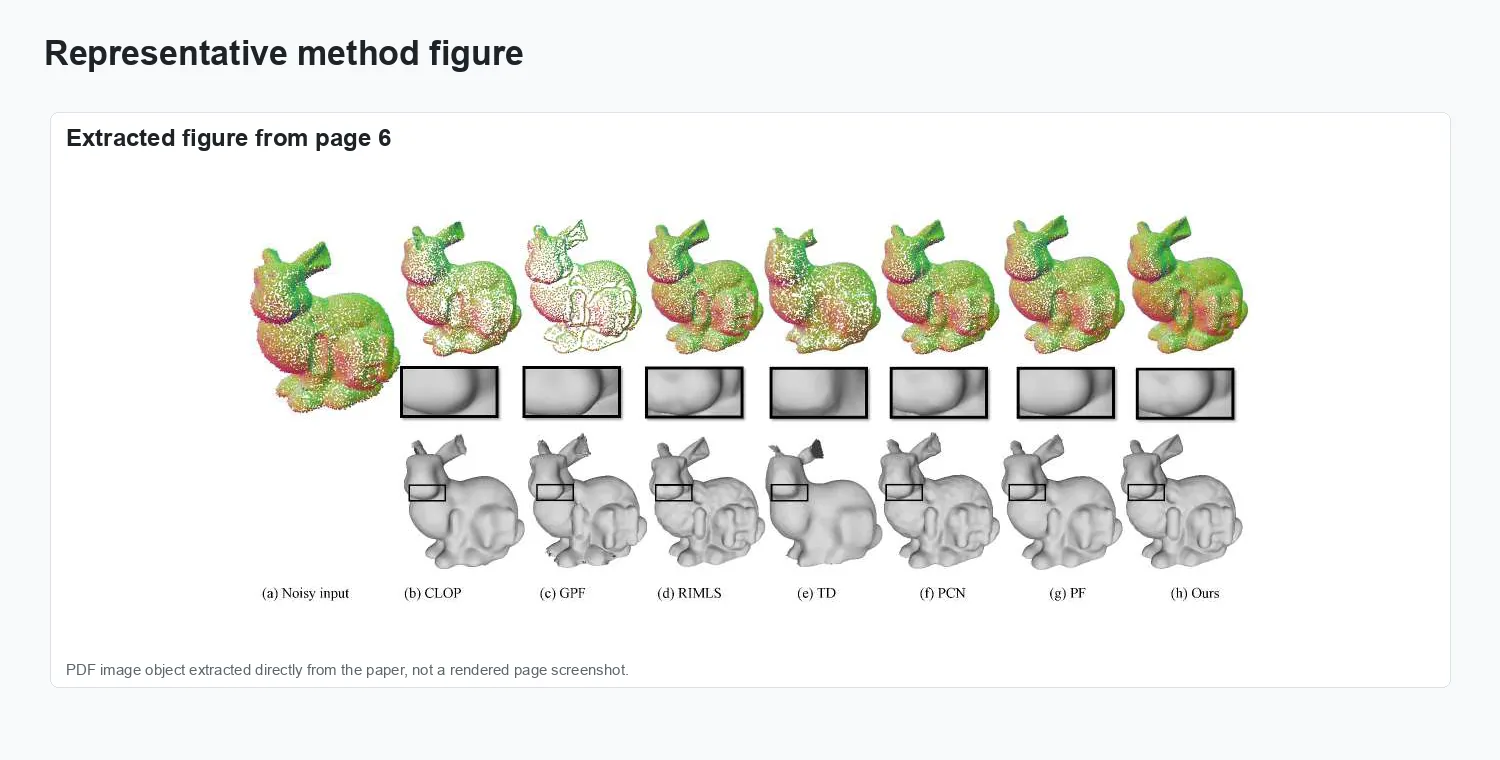
The visuals show normal-guided feature preservation, distribution regularization, and side-by-side filtering results on noisy point clouds.
Method overview.
Representation and setup.
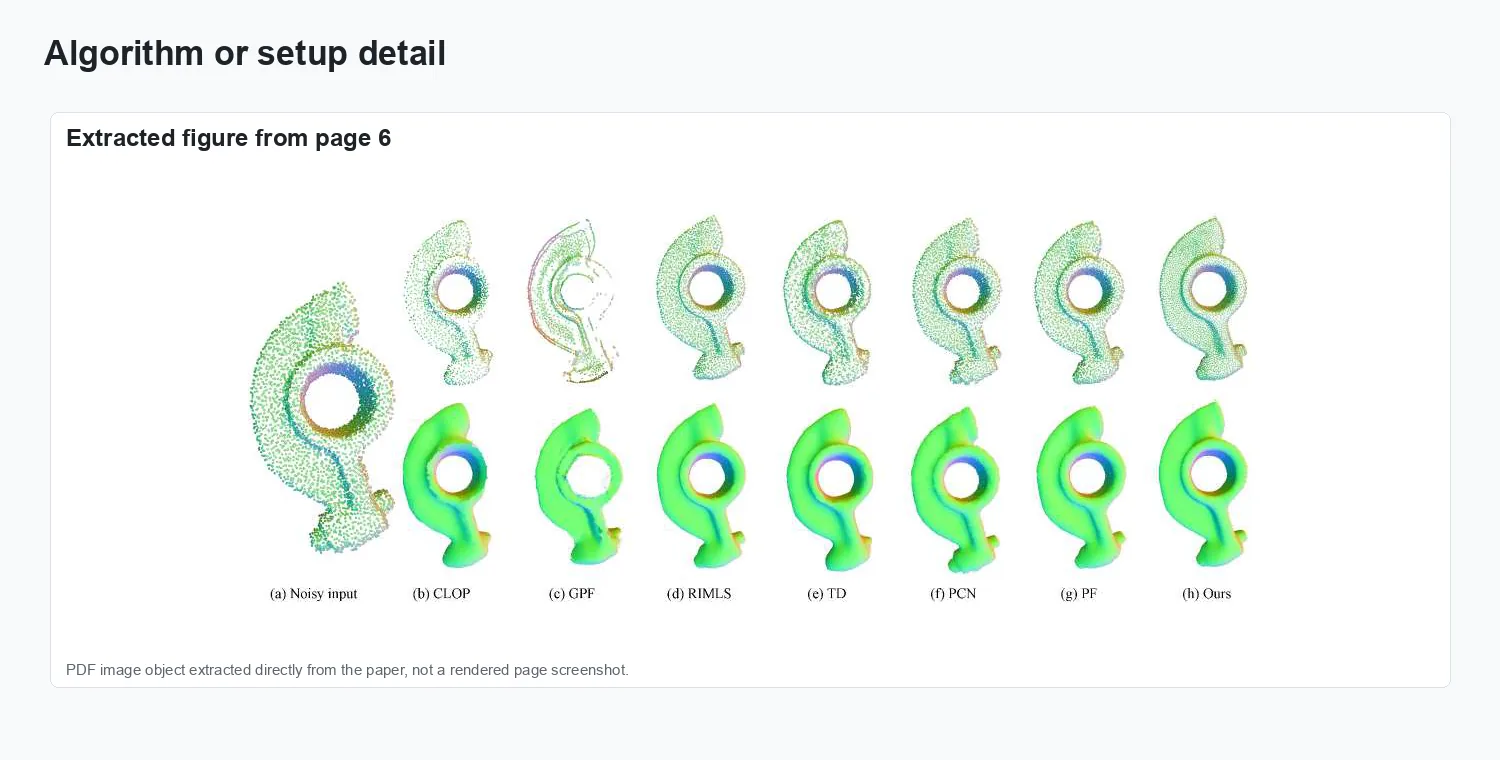
Experimental evidence.
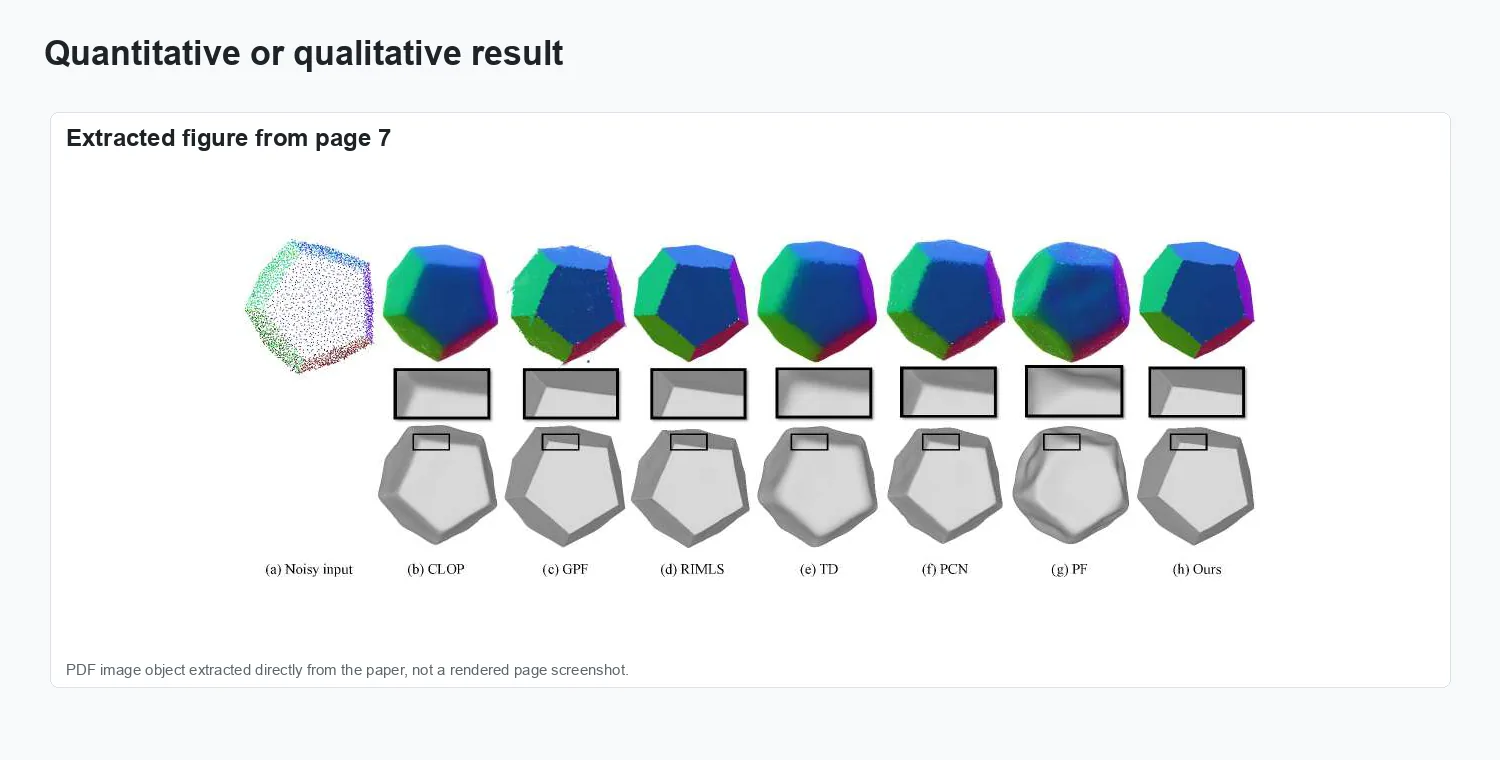
Result comparison.
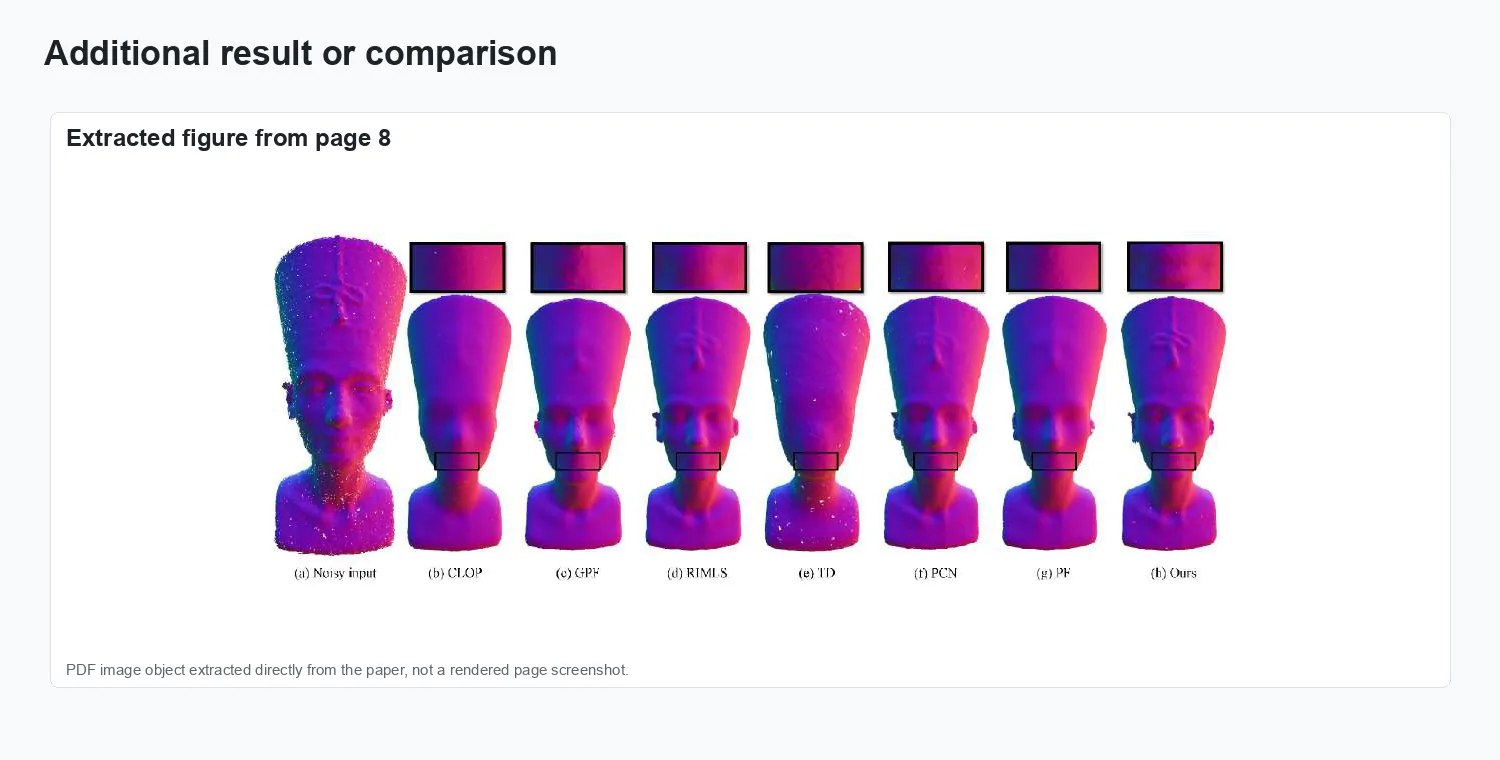
Additional visual result.
Results and impact
The evaluation reported in Computational Visual Media, 9(2):249–263 is summarized through the figures above.