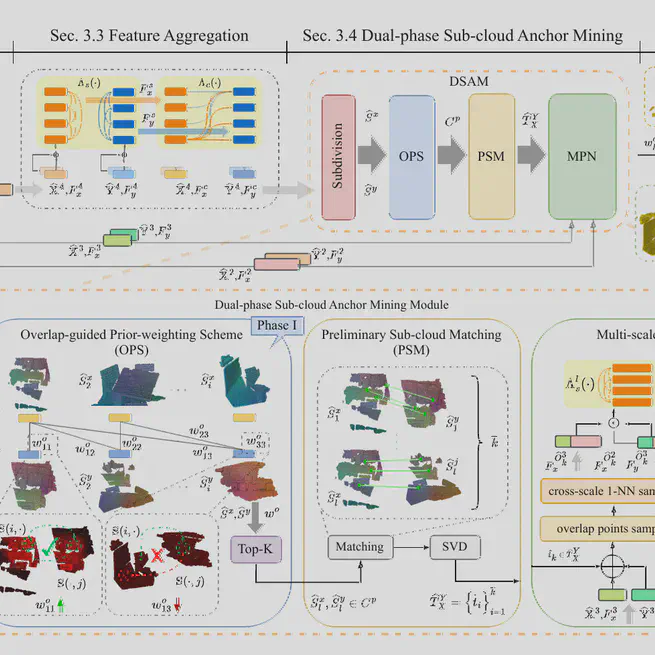
SuP: Sub-cloud Driven Point Cloud Registration
SuP turns low-overlap point cloud registration into high-overlap sub-cloud anchor mining, using DSAM, OPS, MPN, and merge-to-match to recover reliable correspondences from ambiguous partial scans.
Jan 1, 2026
Self-calibrating structured light three-dimensional imaging method with fringe projection
This work focuses on self-calibrating structured light three-dimensional imaging method with fringe projection, contributing to Wei Pan's research thread in 3D vision, optical metrology, geometry processing, and industrial inspection.
Jan 1, 2026
Learning-based reconstruction of moving transparent objects
This work focuses on learning-based reconstruction of moving transparent objects, contributing to Wei Pan's research thread in 3D vision, optical metrology, geometry processing, and industrial inspection.
Jan 1, 2026
Fusing Phase Map Servoing and MPC for High-Precision Robotic Tracking of Dynamic Objects
This work focuses on fusing phase map servoing and mpc for high-precision robotic tracking of dynamic objects, contributing to Wei Pan's research thread in 3D vision, optical metrology, geometry processing, and industrial inspection.
Jan 1, 2026
Volume Measurement Technology of Dispensing Transparent Adhesives Based on Line Laser Scanning
This work focuses on volume measurement technology of dispensing transparent adhesives based on line laser scanning, contributing to Wei Pan's research thread in 3D vision, optical metrology, geometry processing, and industrial inspection.
Jan 1, 2025
SFRF6D: Selective Fewer-Reference Fusion for 6D Pose Estimation
SFRF6D is a model-free 6D pose estimation framework that uses only a few RGB-D reference images, combining reference-view rendering, geometry-guided sparse attention, and coarse-to-fine pose selection for robust estimation under occlusion.
Jan 1, 2025
Photometric stereo-based defect detection for lithium battery top covers
Detecting surface defects on lithium battery top covers is critical for ensuring their performance, reliability, and longevity.
Jan 1, 2025
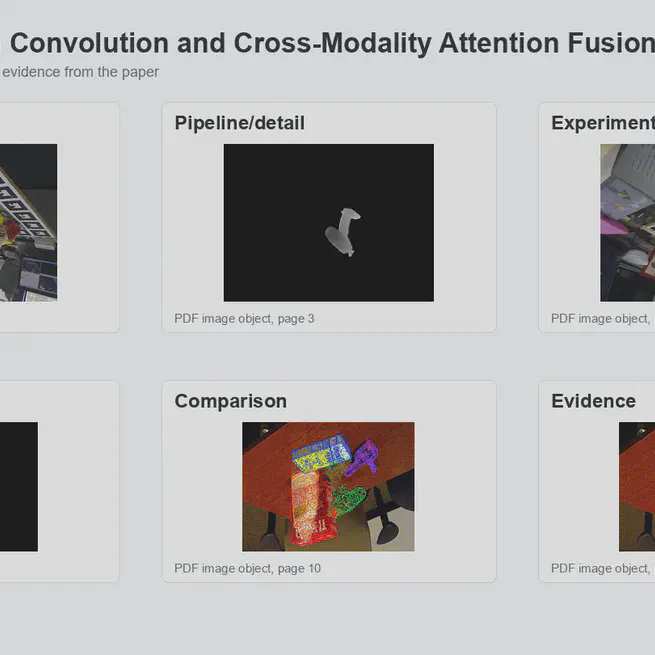
GCMA6D: Graph Convolution and Cross-Modality Attention Fusion for 6D Pose Estimation
GCMA6D is an RGB-D 6D pose estimation network that combines 3D graph convolution, Large Kernel Attention, and cross-modality attention fusion to improve robustness for occluded and low-texture objects.
Jan 1, 2025
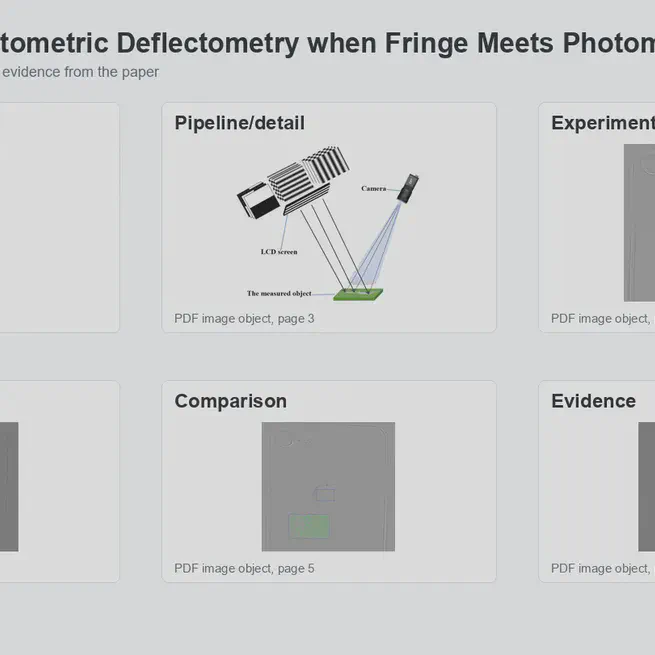
FPD: Fringe Photometric Deflectometry when Fringe Meets Photometric Stereo
FPD fuses Phase Measuring Deflectometry and Photometric Stereo with per-pixel reflectance-aware weights, using PMD in specular regions and PS in diffuse/detail-rich regions for robust 3D reconstruction and defect detection.
Jan 1, 2025
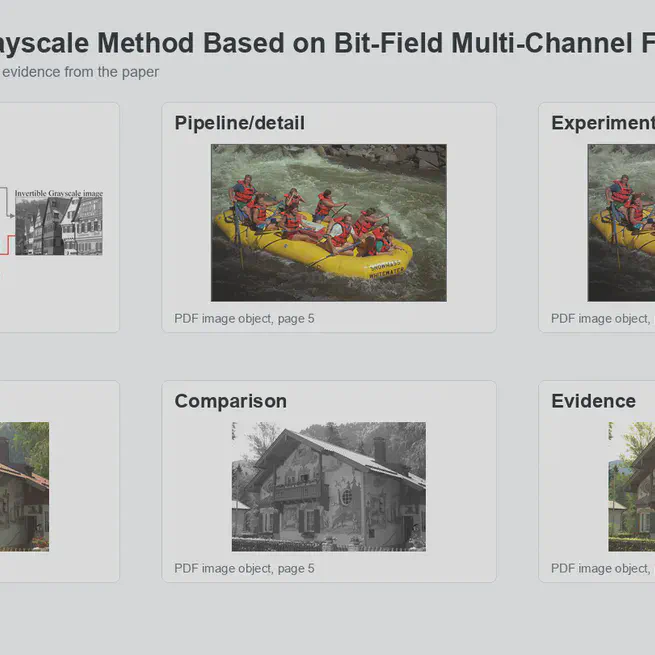
A Reversible Grayscale Method Based on Bit-Field Multi-Channel Fusion Encoding
A grayscale-compatible color encoding method that packs standard 8-bit grayscale into the high bits of a 16-bit image and stores compact hue/saturation hints in the low bits, enabling color restoration while preserving normal grayscale viewing.
Jan 1, 2025