Underwater structured-light 3D imaging method based on FP-DiffNet
This work focuses on underwater structured-light 3d imaging method based on fp-diffnet, contributing to Wei Pan's research thread in 3D vision, optical metrology, geometry processing, and industrial inspection.
Jan 1, 2026
Robust Object 6D Pose Estimation Under High Dynamic Ambient Light
This paper addresses the challenges in object 6D pose estimation caused by illumination changes, proposing an improved Gen6D method for robust operation under high dynamic ambient light conditions.
Jan 1, 2026
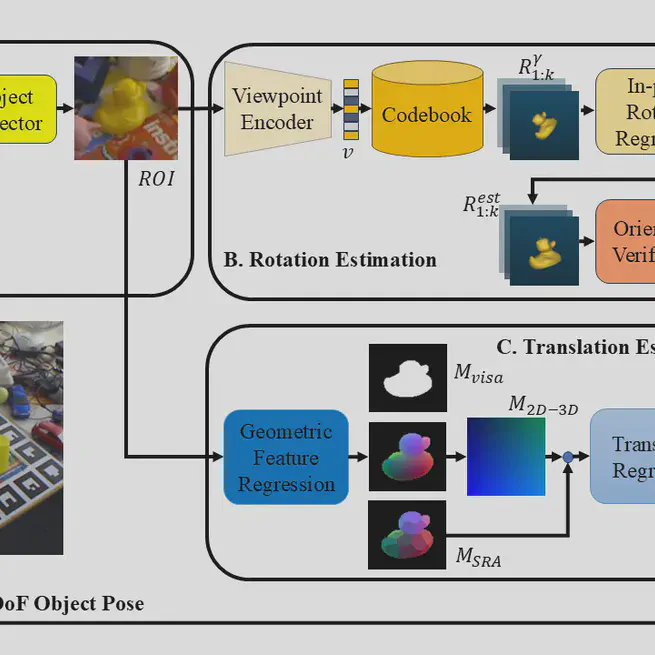
Few-Shot 6D Object Pose Estimation via Decoupled Rotation and Translation with Viewpoint Encoding
A few-shot monocular 6D pose pipeline that decouples rotation and translation: viewpoint-encoded retrieval estimates rotation from synthetic codebooks, while geometry-aware dense correspondences recover translation from limited real data.
Jan 1, 2026
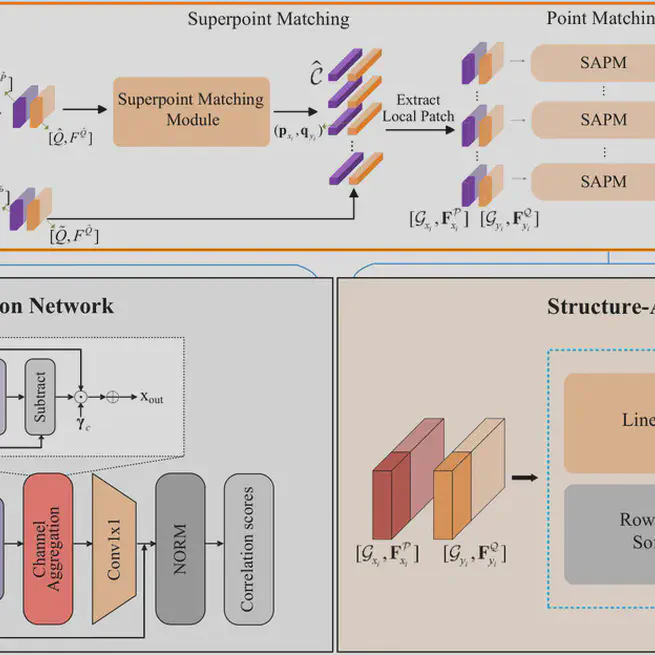
Dynamic correlation network and structure-aware matching for robust point cloud registration
Relative rotations between point clouds pose significant challenges for reliable correspondence estimation.
Jan 1, 2026
Deep diffusion model-based dual structured light for large-format complex surface imaging
This work focuses on deep diffusion model-based dual structured light for large-format complex surface imaging, contributing to Wei Pan's research thread in 3D vision, optical metrology, geometry processing, and industrial inspection.
Jan 1, 2026
Automatic geometric calibration and unwarping of rotating line-scan imaging systems using elliptical distortion of circular patterns
Rotating line-scan cameras and laser profilers operate under a sector-scan geometry, which introduces systematic geometric distortions in both 2D intensity images and 3D line-scan height profiles.
Jan 1, 2026
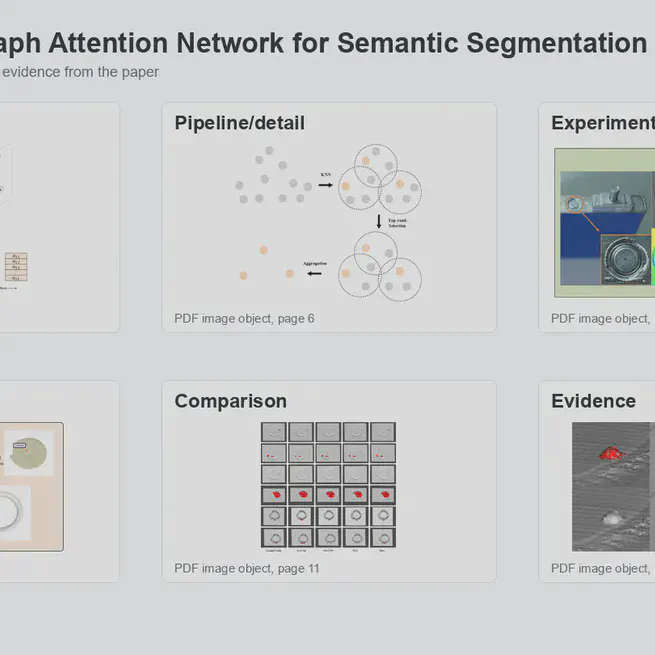
An Improved Graph Attention Network for Semantic Segmentation of Industrial Point Clouds in Automotive Battery Sealing Nail Defect Detection
Accurate defect detection in automotive battery sealing nails is vital for safety and reliability.
Jan 1, 2026
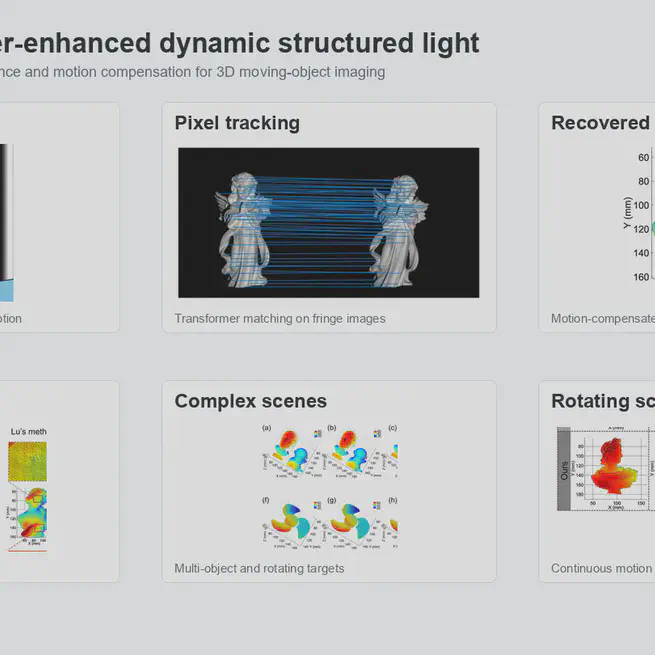
Deep transformer-enhanced dynamic structured light for three-dimensional moving object imaging
This work combines transformer-based fringe-image correspondence tracking with dynamic structured light, estimating pixel-wise motion-induced phase errors and compensating PSP reconstruction for accurate 3D imaging of moving objects.
Dec 15, 2025
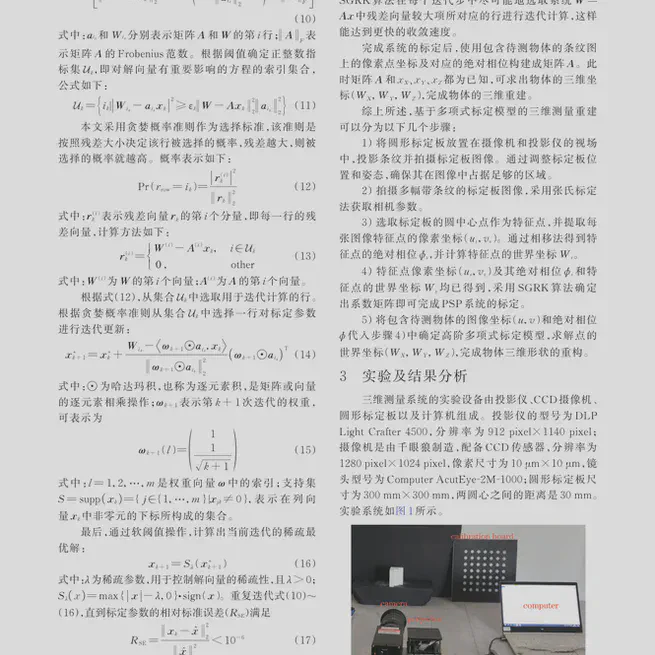
基于高阶多项式的条纹投影标定方法
相移轮廓术因其具有非接触、灵活且测量精度高等优势,广泛用于三维形状信息获取。传统相移轮廓术标定 法存在步骤繁琐、误差敏感且耗时长等问题。基于多项式标定模型,提出了一种基于稀疏贪婪随机Kaczmarz 算法 的快速标定方法,所提方法同时具有随机稀疏Kaczmarz 算法的高效迭代特性及贪婪算法的精选策略,实现了对高 阶多项式标定模型的快速拟合。实验结果表明,所提方法具有较快的标定速度和较高的重建精度。
Jan 1, 2025
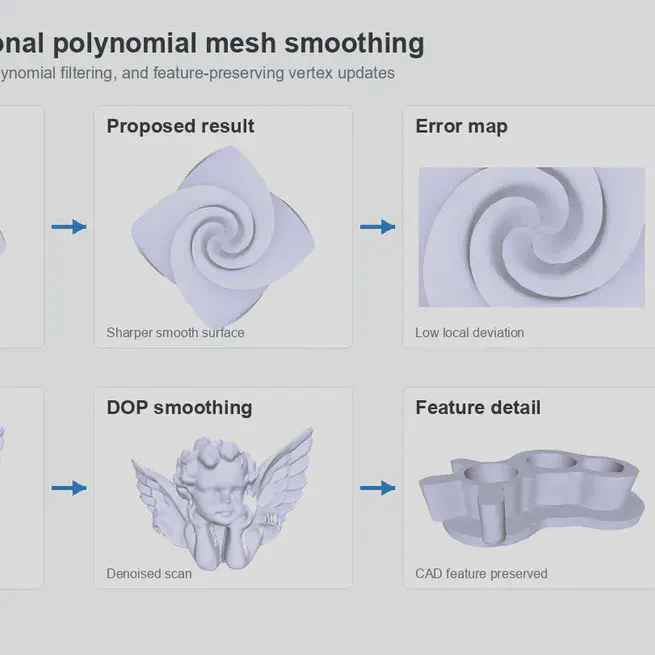
Surface Smoothing based on Discrete Orthogonal Polynomial
This paper proposes a feature-preserving triangle-mesh denoising method that estimates normals from non-local similar structures, filters normal matrices with discrete orthogonal polynomial fitting, and updates vertices to suppress scan noise while retaining sharp geometric details.
Jan 1, 2025