OPT 3D Algorithm Platform
A deployable industrial 3D algorithm stack for preprocessing, reconstruction, registration, matching, measurement, defect inspection, robotic guidance, and Smart3 zero-code workflow deployment.
The 3D algorithm platform connects OPT camera hardware to production workflows. It covers 3D imaging, point-cloud and mesh processing, defect inspection, geometric measurement, 3D matching, pose estimation, and robot guidance.
My role
I lead the industrial 3D algorithm work behind this platform, covering reconstruction, calibration, depth/point-cloud/mesh processing, measurement, defect inspection, registration, 6D pose estimation, and robot-guidance workflows that can be deployed through Smart3.
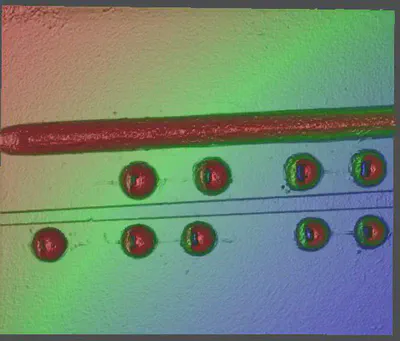
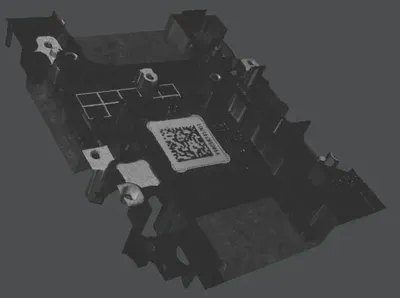
3D imaging
The imaging layer turns raw optical observations into usable depth, height, range, and point-cloud data. It includes laser-profile extraction, structured-light reconstruction, RGB-D alignment, phase processing, depth-map generation, and point-cloud color mapping.
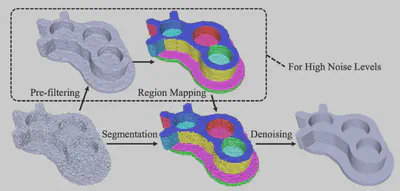
3D processing
The processing layer prepares raw 3D data for downstream decisions. It includes point-cloud denoising, mesh segmentation, smoothing, normal estimation, region mapping, hole filling, and pose/viewpoint resampling. These tools are used when a production scene contains outliers, occlusions, vibration, or nonuniform point density.
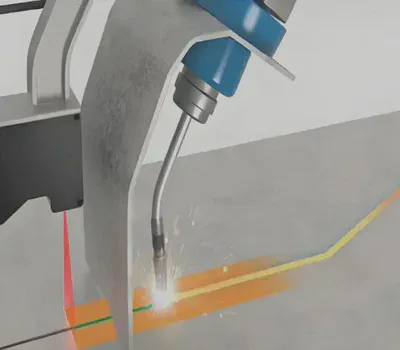
Detection and inspection
Inspection algorithms use 3D geometry together with intensity or RGB cues to detect missed welds, broken welds, pinholes, blowholes, dents, scratches, bumps, glue defects, foreign objects, and surface deviations. The same stack can feed rule-based 3D thresholds or AI-assisted segmentation depending on the application.
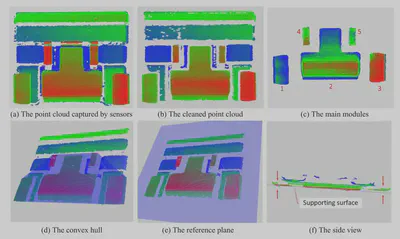
Measurement
The measurement layer turns point clouds and range images into production values: gap width, step height, flatness, parallelism, volume, profile deviation, reference-plane distance, and GD&T-style evaluations. It is designed to keep geometric measurement and inspection decisions in the same coordinate frame.
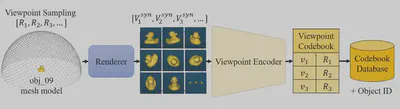
Matching and pose
The matching layer supports CAD-assisted matching, point-cloud stitching, IVD/ICP matching, feature-based registration, and 6D pose estimation. In robot-facing workflows, viewpoint encoding and codebook search can turn a sparse observation into an object pose hypothesis for verification and grasp planning.
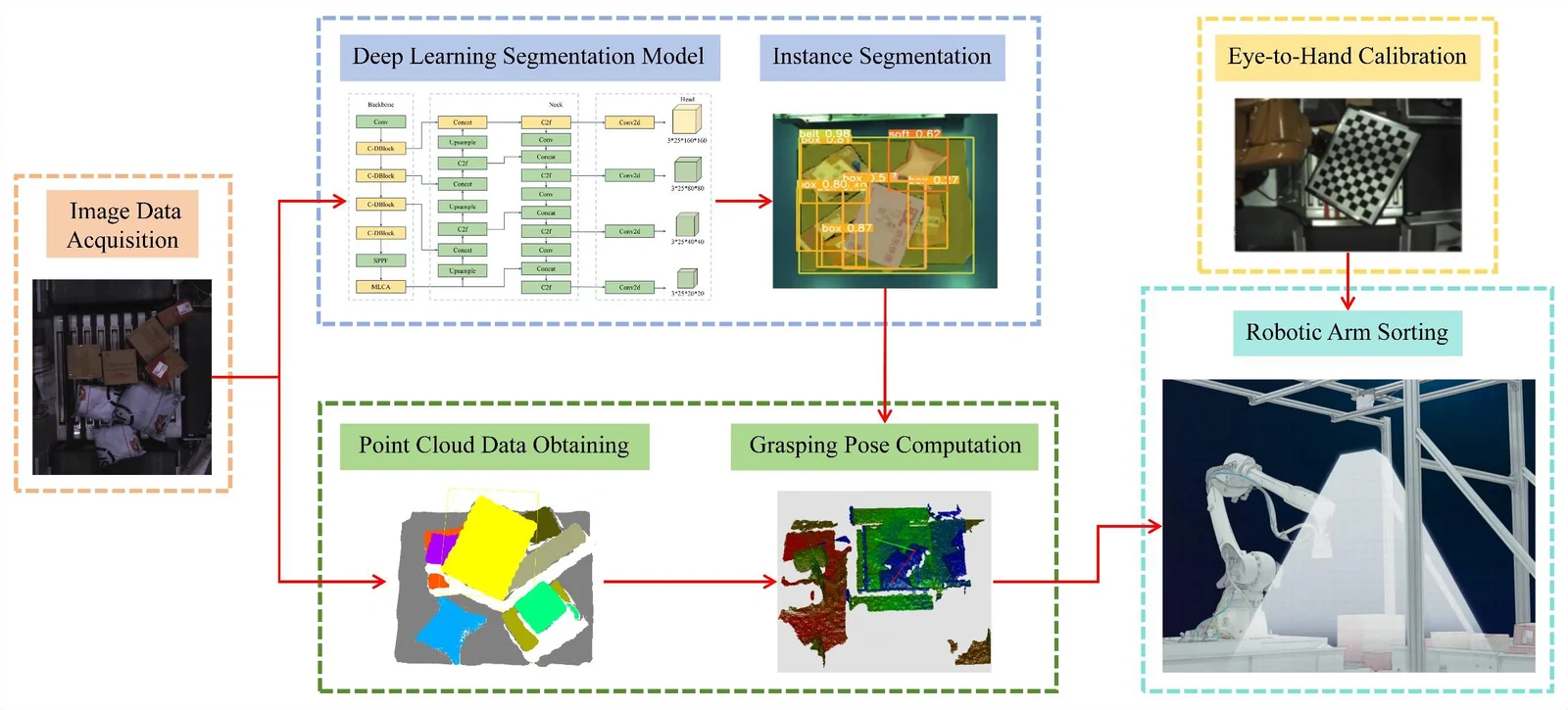
Robotic guidance
Robot applications combine instance segmentation, 3D point-cloud extraction, grasp-pose computation, eye-to-hand calibration, and motion execution. The same 3D algorithm stack supports unordered bin picking, logistics sorting, depalletizing, and high-throughput pick-and-place cells.