3D Autoscan System
A scanner + rotary platform pipeline that captures arbitrary objects to ~0.1 mm in under 5 minutes—built to seed a 3D shape database without per-object parameter tuning.
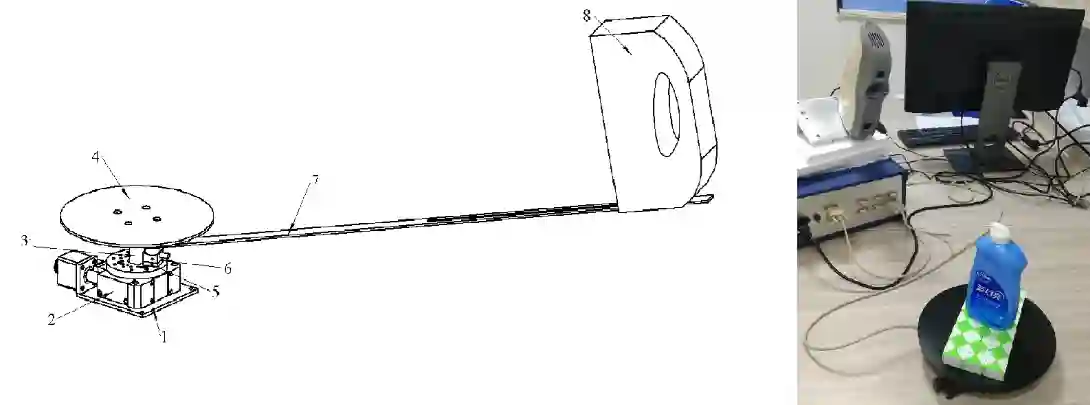
A scanner + rotary platform pipeline that captures arbitrary objects to ~0.1 mm in under five minutes — built to seed a 3D shape database without per-object parameter tuning.
Problem
Building a 3D shape database requires scanning many objects. Off-the-shelf scanning is fine for one model, but at database scale it costs human hours: every object shape requires re-tuning algorithm parameters, and every mis-registration eats into the ~5 min/object budget. The need is a robust pipeline that adapts — per-object parameter tuning has to disappear.
Pipeline
The system fuses three algorithmic stages tuned to handle scale, reflectance, and pose variation without manual intervention.

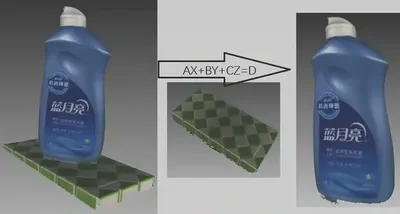

Frame-to-frame registration aligns sequential scans on both geometry and texture; an outlier removal stage strips away background noise; finally a global registration pass aligns the multiple platform poses into a coherent model.